СОДЕРЖАНИЕ:
- История появления сельсинов в промышленности
- Общие сведения и классификация
- Конструкция однофазных сельсинов
- Индикаторный режим работы сельсинов
- Трансформаторный режим работы сельсинов
- Дифференциальный сельсин
- Магнесины
- Применение сельсинов
- Природа ошибок при работе системы синхронной передачи и средства повышения точности
- Ошибки индикаторной синхронной передачи
- Ошибки трансформаторной синхронной передачи
История появления сельсинов в промышленности
Любая отрасль промышленности содержит в своем арсенале электрические машины, которые занимают наибольшее количество устройств. Электрическая машина преобразует механическую и электрическую энергию, отсюда и название - электромеханическое устройство.
Электрические машины делятся на два типа: 1) электрогенератор - машины, преобразующие механическую энергию в электрическую энергию; 2) электродвигатели (электродвигатель) – машины, способные преобразовывать электрическую энергию в механическую энергию.
Электрические машины, используемые в автоматизации, делятся на две группы: силовые электродвигатели и элементы автоматизации электрических машин. Силовые электродвигатели обычно не являются элементами автоматической системы и управляют только рабочим органом, который обычно не является объектом автоматизации.
Элементы автоматизации электрических машин составляют очень разнообразную группу электрических машин, как по назначению, так и по конструкции. Основными типами элементов автоматизации электрических машин являются исполнительные двигатели, усилители электрических машин, тахогенераторы, синхронные машины связи, вращающиеся трансформаторы.
В отличие от силовых электродвигателей, элементы автоматизации электрических машин обязательно включены в систему автоматизации и реагируют на электрические или механические воздействия, возникающие в этой системе.
Основой для создания электрических машин и трансформаторов послужил закон электромагнитной индукции, открытый М. Фарадеем. Начало практическому применению электрических машин было положено русским академиком Б.С. Якоби, который в 1834 году создал конструкцию электрической машины, явившейся прототипом современного электродвигателя.
Изобретение русского инженера М.О. Доливо-Добровольского (1889) трехфазного асинхронного двигателя, отличающегося простотой конструкции и высокой надежностью, способствовало широкому применению электрических машин в промышленности. К началу XX века были созданы почти все типы современных электрических машин и разработаны основы их теории. С тех пор электрификация промышленности и транспорта идет быстрыми темпами.
Общие сведения и классификация
В системах автоматического управления и регулирования иногда возникает необходимость передачи заданного угла поворота вала контролируемого или регулируемого объекта на расстояние или получения информации об угловом положении вала этого объекта. Для этой цели системы передачи удаленных углов используются на электрических синхронных машинах связи, называемых сельсинами. сельсины относятся к информационным электрическим машинам, так как они преобразуют угол поворота в электрический сигнал и, наоборот, электрический сигнал в угловое перемещение.
Схема сельсинов
На рис. 1 показаны структурные схемы систем дистанционной передачи угла поворота вала с помощью синхродатчика СД и синхроприемника СП, соединительных линий связи LS. При повороте вала В на угол α (рис. 1, а) датчик соединения формирует сигнал, соответствующий этому углу, который находится на линии связи на синхронном приемнике СП, где преобразуется в угловое смещение ротора СП на угол α. Рассматриваемая система называется индикаторной, так как вал ресивера вращает индикаторную стрелку И, которая влияет на шкалу угла поворота вала В. Система индикации сообщает только информацию об угловом положении артериального давления. Если требуется воспроизвести угол поворота α вала Б на каком-либо рабочем механизме, то система выполняет усилителем мощности У и исполнительным двигателем ИМ (рис. 1, б), через редуктор Р, создает на валу рабочего механизма РМ крутящий момент, достаточный для поворота вала на угол а. При этом ротор синхроприемника СП поворачивается на угол α. Такая система дистанционной передачи называется трансформатором. На рис. 1 показаны структурные схемы систем дистанционной передачи угла поворота вала с помощью синхродатчика СД и синхроприемника СП, соединительных линий связи LS. При повороте вала В на угол α (рис. 1, а) датчик соединения формирует сигнал, соответствующий этому углу, который находится на линии связи на синхронном приемнике СП, где преобразуется в угловое смещение ротора СП на угол α. Рассматриваемая система называется индикаторной, так как вал ресивера вращает стрелку индикатора И, которая влияет на шкалу угла поворота вала В. Система индикации сообщает только информацию об угловом положении артериального давления. Если требуется воспроизвести угол поворота α вала Б на каком-либо рабочем механизме, то система выполняет усилителем мощности У и исполнительным двигателем ИМ (рис. 1, б), который через редуктор Рвводит крутящий момент на валу рабочего механизма РМ, достаточный для поворота вала на угол α. При этом ротор синхроприемника СП поворачивается на угол α. Такая система дистанционной передачи называется трансформатором.
Рис. 1. Структурные схемы дистанционных систем передачи угла поворота на сельсинах: а – индикаторная, б – трансформаторная
Cельсины также используются в системах электрических валов, которые осуществляют синхронное вращение валов нескольких механизмов, расположенных на расстоянии друг от друга.
Однофазные сельсины получили наибольшее применение в системах дистанционной передачи сигналов. Такой сельсин состоит из неподвижного статора и вращающегося ротора. Однофазная обмотка возбуждения S расположена на статоре однофазного сельсина (рис. 2), а трехфазная обмотка синхронизации OS, соединенная звездой, расположена на роторе. Контактные кольца и щетки используются для электрического подключения обмотки ротора к внешней цепи. Кольца закреплены на валу сельсина и изолированы друг от друга. Между кольцами и щетками имеется скользящий контакт, так как кольца вращаются вместе с ротором, а щетки неподвижны
В дополнение к рассматриваемому сельсину, называемому контактным сельсином, существуют бесконтактные сельсины, в которых все обмотки расположены на статоре, следовательно, они не имеют контактных колец и щеток.
сельсин является асинхронной электрической машиной, так как ее принцип работы основан на трансформаторном соединении между обмотками на статоре и роторе: напряжение, подаваемое на одну из обмоток, передается на другую обмотку за счет индуктивного соединения между ними.
Cельсины устройство
Сельсинами называются электрические микромашины, которые обладают способностью к самосинхронизации и используются в системах индукционной синхронной связи в качестве датчиков и приемников. Слово "сельсин" происходит от английских слов self-synchronizing, что означает самосинхронизирующийся.

Рис. 2. Схема однофазного сельсина
Принцип действия сельсина
сельсины, используемые в индукционных синхронных системах связи, и сами системы можно разделить на две группы: трехфазный источник питания и однофазный. Устройства индукционной синхронной связи используются для передачи углового перемещения или линейного, преобразованного в угловое, на расстояние. В то же время существует только электрическое соединение между устройством, которое задает угол (датчик), и устройством, которое принимает передаваемое значение (приемник). Это электрическое соединение между датчиком и приемником называется линией связи. Передача угловой величины в такой системе происходит синхронно, синфазно и плавно.
Трехфазные сельсины используются в электрических цепях вала, где требуется строго синхронное и синфазное вращение двух двигателей, удаленных друг от друга. В таких схемах сельсин работает и как датчик, и как приемник.
Однофазные сельсины могут работать в двух основных режимах:
- индикатор, когда датчик принудительно поворачивается и приемник устанавливается в положение, соответствующее датчику, под воздействием его собственного синхронизирующего момента;
- трансформатор, когда датчик принудительно поворачивается, а приемник генерирует напряжение в зависимости от угла смещения.
Для обоих режимов возможны следующие схемы: а) парилка: приемник датчика;
б) множественный: датчик – несколько приемников; в) дифференциальный: два датчика - приемник.
Однофазный сельсин может работать как в индикаторном, так и в трансформаторном режиме в качестве датчика и приемника. Однако в силу специфики требований выпускаемые сельсины рассчитаны на определенный режим работы.
Основные требования ко всем однофазным сельсинам:
- высокая статическая и динамическая точность. Статическая точность определяется величиной ошибки передачи угла в режиме медленного вращения, а динамическая точность определяется в режиме непрерывного вращения;
- способность к самосинхронизации во время одного оборота, т.е. свойство системы на сельсинах занимать только одно устойчивое последовательное положение во время оборота;
- сохранение свойства самосинхронизации при высоких скоростях вращения.
Чтобы соответствовать этим требованиям, индикаторные сельсины должны развивать наибольшие удельные и максимальные синхронизирующие моменты и иметь минимальное время простоя ротора приемник.
Трансформаторные сельсины должны иметь максимально возможное удельное выходное напряжение при заданном сопротивлении нагрузки и минимальном выходном сопротивлении приемника.
Кроме того, в зависимости от условий использования к сельсинам предъявляются и другие требования.]
Конструкция однофазных сельсинов
Однофазные сельсины по конструкции и наличию скользящего контакта можно разделить на контактные и бесконтактные.
Контактные сельсины (рис. 3, а) состоят из двух частей: статора и ротора. На статоре (или на роторе) размещена однофазная обмотка возбуждения, а на роторе (или на статоре) размещена обмотка синхронизации ОС. Конструктивно они аналогичны синхронным машинам с электромагнитным возбуждением.
Рис. 3. Схемы контактных сельсин:
а - электрический, б - конструктивный: 1 – статор; 2 - обмотка синхронизации; 3 - ротор; 4 - обмотка возбуждения;
5 - обмотка демпфера; 6 - контактные кольца
В однофазных сельсинах обмотка синхронизации выполнена по трехфазному типу, т.е. три отдельные обмотки смещены в пространстве на 120° и соединены со звездой, а индуцируемая в ней ЭДС и токи, проходящие через ее отдельные обмотки, имеют одинаковое время фаза. Поэтому правильнее было бы назвать синхронизирующую обмотку трехлучевой.
Обмотка синхронизации всегда распределена. Обмотка возбуждения может быть выполнена как распределенной, так и концентрированной. Поскольку в случае распределенной обмотки характеристика крутящего момента имеет меньшую крутизну, предпочтительно использовать концентрированную обмотку возбуждения в сельсинах, предназначенных для режима индикатора. Количество пар полюсов в сельсине выбрано равным единице (p - 1), чтобы получить самосинхронизацию во время одного оборота.
Обмотка возбуждения сельсина создает пульсирующий магнитный поток. Этот поток, проходя через магнитопровод сельсина, пересекает пучки обмотки синхронизации и индуцирует в них ЭДС в зависимости от угла поворота ротора. Поскольку при вращении ротора взаимная индуктивность между обмоткой возбуждения и обмоткой синхронизации плавно изменяется по закону косинуса, в лучах обмотки синхронизации индуцируется ЭДС, пропорциональная косинусу угла поворота ротора.
Некоторые сельсины имеют демпфирующую обмотку OD, расположенную перпендикулярно обмотке возбуждения.
Принцип работы сельсина
Принцип работы сельсина не зависит от расположения каждой из обмоток: на статоре или на роторе. Однако наибольшее распространение получили сельсины с обмоткой возбуждения на роторе и обмоткой синхронизации на статоре (рис. 3, б). Они имеют меньшее количество контактных колец и щеток, что обеспечивает более высокую надежность, меньший момент трения и объем сельсина. В цепи передачи сигнала отсутствуют скользящие контакты (линии связи с обмоткой синхронизации). При такой конструкции легче наматывать заслонку на ротор.
Наличие скользящих контактов значительно снижает надежность контактных сельсинов. Поэтому чаще используются бесконтактные сельсины:
а) с однополярным возбуждением ротора со стороны статора;
б) с переходным кольцевым трансформатором.
В бесконтактной катушке с однополярным возбуждением подача контактного тока на ротор заменяется бесконтактной подачей магнитного потока. На рисунке 4 показана конструктивная схема такого бесконтактного сельсина.
На статоре расположен пакет основного магнитопровода 1, в пазах которого расположена трехфазная обмотка синхронизации 2. Обмотка возбуждения 3, выполненная в виде двух кольцевых катушек, также размещена на статоре. По краям статора расположены два кольцевых магнитопровода 4. Они магнитно замкнуты друг на друга пакетами внешнего магнитопровода 5, которые запрессованы в цилиндрический корпус сельсина 6.
Основной и кольцевой магнитопроводы собраны из изолированных листов электротехнической стали, продетых нитку вдоль поперечной оси катушки. Чтобы каждый лист не представлял собой короткозамкнутую катушку на пути основного потока возбуждения, вводимого вдоль продольной оси, он имеет радиальное сечение в одном месте. Сборка листов в упаковку имеет веерообразную форму, что обеспечивает равномерную магнитную проводимость упаковок вдоль любой оси. Пакеты внешней магнитной цепи заряжаются вдоль продольной оси сельсина. Ротор сельсина 7 состоит из двух пакетов, разделенных немагнитным зазором 8.
Каждый пакет собран из изолированных листов электротехнической стали, а плоскости листов ротора параллельны продольной оси сельсина. Немагнитный зазор обычно представляет собой пластик, в который запрессованы листы обоих корпусов ротора. Иногда в качестве немагнитного слоя используется силуминовый сплав.
Принцип работы бесконтактного сельсина
Принцип работы бесконтактного сельсина легко понять, проследив путь магнитного потока F.
Пусть ток в обмотке возбуждения 3 протекает в заданное время, как показано на фиг. 4. Затем магнитный поток будет направлен слева направо. Поток, выходящий из точки А, встречает на пути немагнитный зазор 8, меняет направление и входит в пакет магнитопровода 1 через воздушный зазор Δ, проходит через него путь 180° и входит в правый пакет ротора через воздушный зазор δ2. Отсюда
поток через зазор δ3 включается в правый кольцевой магнитопровод 4. Далее поток пакетов внешнего магнитопровода 5 удерживается в левом кольцевом ярме 4 и, проходя через воздушный зазор δ4, возвращается в левый мешок ротора, где замыкается в точке А. Проходя мимо основного магнитопровода 1, поток подключается к обмотке возбуждения синхронизации и выводит на нее ЭДС.
Рис. 4. Конструктивная схема бесконтактного поворотного устройства с однополярным возбуждением Когда ротор вращается, магнитный поток также вращается вместе с ним, т.е. потоковая связь обмотки синхронизации с потоком возбуждения изменяется по тому же закону, что и у контактного сельсина. Поэтому работа этих сельсинов в синхронных системах связи не имеет принципиальных отличий от работы контактных сельсинов.
Сравнивая траектории магнитного потока в контактных и бесконтактных сельсинах согласно рис. 3, б и 4, нетрудно заметить, что в бесконтактных сельсинах магнитный поток преодолевает вдвое больше воздушных зазоров. Значительная часть MDS обмотки возбуждения расходуется на преодоление воздушного зазора, поэтому обмотка возбуждения бесконтактных сельсинов больше по размерам и весу, чем у контактных, изготовленных в тот же полезный момент. Магнитопровод в бесконтактных сельсинах также имеет больший размер и вес, чем в контактных.
Для сравнения в таблице 1 приведены некоторые данные двух типов бесконтактных приемников серии BS и серии NS серии сельсина, имеющих, соответственно, одинаковые габаритные размеры (частота напряжения 50 Гц).
Таблица 1
|
Параметры |
БС-404 |
НС-404 |
БС-501 |
НС-501 |
|
Удельный момент, Нм/град |
4 ·10-4 |
10·10 -4 |
5·10-4 |
50·10-4 |
|
Вес на единицу удельного момента, кГ/(Нм/град) |
3000 |
800 |
1140 |
570 |
|
Мощность на единицу удельного момента, ВА/(Нм/ град) |
12,4·104 |
3,1·104 |
4,2·104 |
1,66·104 |
На рисунке 5 показан бесконтактный датчик с однополярным возбуждением типа BS-404 в разобранном виде.
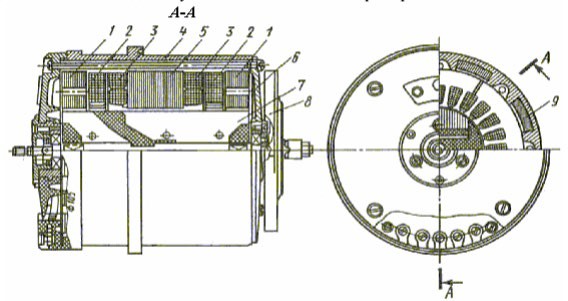
Рис.5. Конструкция бесконтактного сельсина: 1 – кольцевой сердечник (тороид); 2 – катушка обмотки возбуждения; 3 – обмотка синхронизации; 4 –
корпус, 5 – сердечник статора; 6 – подшипниковые щиты; 7 – механический демпфер; 9 – пакеты внешнего магнитопровода.
Бесконтактные реле с переходными трансформаторами состоят из двух частей: машины и трансформатора, соединенных только электрически (рис. 6). Машинная часть не отличается от кон-
Тактично Селина. Обмотка синхронизации 2 расположена на статоре 1, а обмотка возбуждения 4 (иногда демпфирующая) расположена на роторе 3. Трансформаторная часть представляет собой кольцевой трансформатор с двумя обмотками. Обмотки статора 5 с ферромагнитным сердечником 6 и ротора 7 с ферромагнитным сердечником 8 выполнены в виде сосредоточенных катушек, магнитные оси которых совпадают с направлением вала. Благодаря концентрическому расположению взаимная индуктивность обмоток не изменяется при вращении ротора. Когда однофазный трансформатор переменного напряжения подается на выводы обмотки статора, вторичное напряжение, неизменное по амплитуде, снимается с его обмотки ротора.
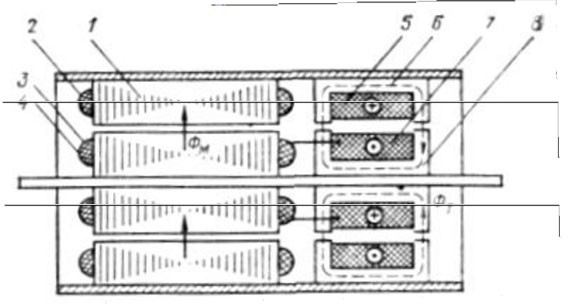
Рис. 6. Конструктивная схема бесконтактного генератора с переходным кольцевым трансформатором
Это напряжение подается по проводам на обмотку возбуждения детали машины. Таким образом, скользящие контакты могут быть устранены.
Наличие двукратной передачи энергии через воздушный зазор (в деталях трансформатора и машины) приводит к тому, что бесконтактные сельсины обладают более высокой мощностью возбуждения по сравнению с контактными.
Благодаря переходному трансформатору длина бесконтактного сельсина больше.
Бесконтактные сельсины имеют более сложную конструкцию и несколько более высокую стоимость. Однако высокая надежность этих сельсинов окупает их недостатки. Кроме того, бесконтактные сельсины имеют меньший момент трения на валу, чем контактные.
Дифференциальные сельсины отличаются от рассмотренных однофазных контактных сельсинов только тем, что они имеют трехлучевые обмотки на статоре и роторе.
Отличительной особенностью контактных сельсинов является наличие контактных колец и щеток, через которые обмотка ротора подключается к внешней цепи. Обычно сельсины делаются биполярными. Система магнитных контактов сельсина (сердечники статора и ротора) изготовлена из листовой электротехнической стали. сельсины могут быть явно полярными и неявно полярными. В однополюсных сельсинах один из элементов магнитопровода (статор или ротор) имеет два ярко выраженных полюса с полюсными катушками обмотки возбуждения. Затем другой элемент (ротор или статор) неявно поляризуется с распределенной синхронизирующей обмоткой ОС, состоящей из трех фазных обмоток, сдвинутых в пространстве относительно друг друга на 120° (рис. 7, а, б). Если ротор приемника сельсина однополюсный, то на его сердечнике обычно размещается демпфирующая обмотка в виде короткозамкнутой катушки, ось которой перпендикулярна оси полюсов. В неполюсных сельсинах обмотки статора и ротора распределены. В этом случае обмотки синхронизации OS и возбуждения S могут располагаться как на роторе, так и на статоре (рис. 7, б).
В системах индикаторов обычно используются явные полюсные сельсины, поскольку они имеют увеличенное значение удельного синхронизирующего момента. В трансформаторных системах используются неявные полюсные сельсины, так как их удельный синхронизирующий момент меньше, чем у явных полюсных, но распределение магнитной индукции в воздушном зазоре почти синусоидальное, что обеспечивает им необходимую точность в трансформаторной системе.
Рис. 7. Магнитные системы однофазных контактных сельсинов: с явнополюсным статором (а), с явнополюсным ротором (б), неявнополюсная (в)
На рисунке 8 показано устройство контактного сельсина с неявной магнитной системой. Обмотка синхронизации 4 расположена на сердечнике 3 статора, а обмотка возбуждения 2 расположена на сердечнике 1 ротора. Контактные кольца 5 и щетки обычно изготавливаются из сплава, содержащего серебро, что способствует более надежной и продолжительной работе этого контактного узла сельсинов. Обмотка возбуждения может располагаться как на роторе, так и на статоре. Когда он установлен на роторе, количество контактных колец равно двум. В этом случае ток возбуждения непрерывно проходит через кольца и щетки, даже когда система согласована. Если на роторе расположена обмотка синхронизации, ток проходит через кольца и щетки (в случае индикаторной системы) только в том случае, если система не соответствует. При этом количество колец увеличивается до трех, что приводит к увеличению момента сопротивления за счет увеличения сил трения в узле контакта.
Сила прижатия щеток к контактным кольцам оказывает существенное влияние на свойства сельсина. При низком давлении момент сопротивления на валу сельсина уменьшается, но увеличивается переходное электрическое сопротивление скользящего контакта и, как следствие, погрешность индикаторной системы. Если щетки нажимаются слабо, то во время вибраций возможна периодическая потеря скользящего контакта и неисправность системы. С сильным давлением контакт с кольцами улучшается, но момент сопротивления увеличивается из-за увеличенных сил трения щеток о кольца, что увеличивает погрешность системы индикаторов и сокращает срок службы щеток и контактных колец из-за их быстрого износа.
Рис. 8. Устройство контактного сельсина с неявной магнитной системой
Наличие скользящего контакта является существенным недостатком контактных сельсинов, что снижает их надежность и точность.
Для повышения надежности контактных сельсинов кольца и щетки обычно изготавливаются из сплавов, содержащих серебро. Однако эта мера не полностью устраняет недостатки, присущие контактным сельсинам.
Наиболее широко используемыми в устройствах автоматизации являются бесконтактные сельсины, не имеющие скользящих электрических контактов (колец и щеток). Эти сельсины отличаются от контактных высокой точностью и стабильностью характеристик; при колебаниях температуры, влажности и т.д., а также высокой эксплуатационной надежностью.
В настоящее время используются бесконтактные сельсины двух конструкций: сельсины с двумя обмотками на статоре и сельсины с кольцевым трансформатором. сельсины с двумя обмотками на статоре были разработаны советскими учеными А.Г. Иосифяном и Д.В. Свечарником. На рисунке 9 показана конструктивная схема такого сельсина. Ротор 6 представляет собой цилиндр, изготовленный из ферромагнитного материала (стали), состоящий из двух магнитно разделенных частей, называемых полюсами. Алюминиевая прослойка используется в качестве магнитной изоляции, отделяющей полюса ротора друг от друга.
Рис. 9. Конструктивная схема бесконтактного сельсина конструкций Иосифяна и Свечарника
Один и тот же слой удерживает полюса ротора вместе. На торцевых сторонах сельсина расположены тороидальные сердечники 1, изготовленные из тонколистовой электротехнической стали. Внутренняя поверхность этих сердечников расположена над ротором, а стержни внешнего магнитопровода 4 прилегают к их наружной поверхности. Однофазная обмотка возбуждения сельсина выполнена в виде двух дисковых катушек 2, расположенных на противоположных сторонах статора между обмоткой синхронизации 5 и тороидальными сердечниками 1. Магнитный поток возбуждения, замыкаясь вокруг правой дисковой катушки 2 вдоль правого тороидального сердечника 1, проходит через воздушный зазор в один из полюсов ротора 6.
Благодаря немагнитному зазору 7, разделяющему полюса ротора, этот магнитный поток проходит через воздушный зазор между ротором и статором в сердечник 3 статора с обмоткой синхронизации 5. Проходя через зубья и на задней стороне этого сердечника поток через воздушный зазор проходит во второй полюс ротора.
Затем через зазор и левый тороидальный сердечник 1 вокруг левой дисковой катушки 2 он входит в стержни внешней магнитопровода 4 и замыкается в правом тороидальном сердечнике 1.
Таким образом, во время работы сельсина пульсирующий поток магнитного возбуждения замыкается в магнитной системе сельсина, блокируясь с обмоткой синхронизации на сердечнике статора. В то же время, если ротор сельсина вращается, то магнитный поток будет вращаться вместе с полюсами ротора, т.е. в бесконтактном сельсине, как и в контактном, потоковое соединение потока возбуждения с обмоткой синхронизации зависит от пространственного положения (угла поворота) ротора. Благодаря разделению бесконтактного ротора сельсина на магнитно изолированные полюса обмотки синхронизации и возбуждения могут быть расположены на статоре, а контактные кольца и щетки могут быть удалены. Магнитный поток возбуждения (см. рис. 9), замыкаясь в магнитопроводе сельсина, проходит через воздушный зазор четыре раза. Поэтому для создания требуемого магнитного потока в сельсине требуется значительное MDS обмотки возбуждения, что является причиной увеличения габаритных размеров бесконтактного сельсина по сравнению с контактным сельсином.
В таблице 2 приведены технические данные контактных и бесконтактных приемников сельсина с одинаковыми максимальными значениями синхронизирующих моментов. Несмотря на большой вес и габаритные размеры, бесконтактные сельсины широко применяются в устройствах автоматизации, что объясняется их повышенной надежностью и стабильностью характеристик. В последнее время стали использоваться бесконтактные сельсины с кольцевым трансформатором (рис. 10). Обмотка синхронизации 2 такого сельсина расположена на статоре 4, обмотка возбуждения 1 расположена на роторе 3. Обмотка возбуждения питается от кольцевого трансформатора. Магнитопровод этого трансформатора состоит из двух частей, разделенных воздушным зазором. Неподвижная часть 5 с первичной обмоткой 6 расположена на статоре, а вращающаяся часть 8 со вторичной обмоткой 7 расположена на роторе. Энергия от первичной обмотки трансформатора 6 передается на вторичную обмотку 7, соединенную с обмоткой возбуждения сельсина. Магнитный поток F в кольцевом магнитопроводе трансформатора дважды проходит через воздушный зазор, что является причиной увеличенного значения тока намагничивания, а следовательно, и габаритных размеров трансформатора.
Однако на частотах 400, 500 и 1000 Гц, для которых предназначен рассматриваемый сельсин, кольцевой трансформатор имеет небольшие габаритные размеры, позволяющие разместить его в корпусе сельсина.
Таблица 2
|
Тип и конструкция сельсина |
Параметры |
|||
|
Частота, Гц |
Потребляемая |
Максимальный |
Масса, кг |
|
|
СС-501 контактный |
50 |
13 |
176 |
2,8 |
|
БЦ-501 бесконтактный |
50 |
29 |
176 |
4,1 |
Рис. 10. Устройство бесконтактного сельсина с кольцевым трансформатором
Индикаторный режим работы сельсинов
Для передачи информации о положении регулирующего органа на расстоянии: клапанов, заслонок клапанов и т.д. наиболее удобны сельсины, работающие в режиме индикатора, особенно когда подход к регулирующему органу небезопасен и показания передаются на панель управления. В этом случае приемник сельсина, как правило, не должен иметь момента сопротивления на валу, к его ротору подключена только стрелка, указывающая величину передаваемого угла.
Обычно в режиме индикатора работают два идентичных сельсина: SD-датчик и SP-приемник. На рисунке 11 показана схема однофазных сельсинов, работающих в режиме индикатора. Обмотки возбуждения сельсина подключены к однофазной сети переменного тока. Обмотки синхронизации соединены между собой линией связи строго соответствующим образом.
График зависимости синхронизирующего момента от угла отрыва показывает, что сельсин имеет две точки согласованного положения (0=0; 0=180°). В этих точках момент равен нулю и, казалось бы, это противоречит главному свойству сельсинов - самосинхронизации в пределах одного оборота. Но эти положения не эквивалентны: одно из них соответствует устойчивому равновесию 0 = 0, другое - неустойчивому 0 = 180°.
Давайте возьмем это в качестве примера двух магнитов.
Если другой магнит помещен между двумя полюсами магнита, то вы можете указать два положения, в которых момент равен нулю:
-
когда магнит обращен к другому противоположными полюсами (устойчивое равновесие),
-
когда магнит обращен к другому одноименными полюсами (неустойчивое равновесие).
Когда число пар полюсов равно p > 1, число точек устойчивого равновесия равно p (например, 0 = 0 и 180° при p
= 2), а передача угла неоднозначна.
Наиболее важной характеристикой сельсина является специфический синхронизирующий момент. Это понимается как величина синхронизирующего момента на один градус угла смещения в начале характеристики, т.е. конкретный синхронизирующий момент - это крутизна начального участка угловой характеристики:
В случае однотипных датчика и приемника величину удельного момента можно определить по формуле

где Rq, Xq – активное и индуктивное сопротивления обмотки син- хронизации по поперечной оси; f – частота напряжения сети.
Рис. 11. Схема однофазных сельсинов в индикаторном режиме
В режиме индикатора угол передается со статической угловой погрешностью. При работе без нагрузки погрешность, вызванная собственным моментом трения МТ приемник-приемник, является основной и характеризует величину мертвой зоны приемника, в пределах которой ротор приемника может занимать любое положение при одном и том же положении датчика. Величина этой зоны определяется отношением собственного момента трения приемника сельсина к определенному синхронизирующему моменту
В МТ / МУД , град ,
град, и он тем уже, чем больше количество МУД.
сельсины различных размеров имеют удельный синхронизирующий момент, равный (1 – 50)·10-4 Нм/град.
В зависимости от величины статической погрешности сельсины, работающие в режиме индикатора, делятся на четыре класса точности. Статическая погрешность не превышает ±30' в сельсинах высшего класса и достигает
+90' в сельсинах низшего класса.
Для всех классов точности погрешность приемника значительно превышает погрешность датчика. Погрешность датчика в основном обусловлена технологическими факторами (асимметрия обмоток, дисбаланс магнитной проводимости по осям и т.д.), а на погрешность приемника дополнительно влияют моменты трения в подшипниках и в узле контакта щеточного кольца, момент статического дисбаланса ротора, реактивные моменты зубьев и т.д.
Во время работы на точность передачи влияют колебания напряжения и частоты питающей сети и сопротивление линии связи сельсина. Уменьшение напряжения и увеличение частоты приводят к уменьшению потока возбуждения Pd. Увеличение расстояния между сельсинами и сопротивлением линии связи уменьшает ток в обмотках синхронизации и Fmax MDS. В обоих случаях момент синхронизации и точность передачи снижаются. Резкое снижение точности передачи происходит, когда на валу приемника возникает момент нагрузки.
В некоторых случаях сельсины в режиме индикатора работают с непрерывным вращением. Синхронизирующий момент, называемый в данном случае динамическим, является функцией скорости вращения, поскольку ЭДС вращения, индуцируемая в обмотках синхронизации, уменьшает ее величину. Значение динамического синхронизирующего момента для Din, разработанного приемником сельсина, можно найти с помощью эмпирических формул.
Динамический синхронизирующий момент при малых углах выравнивания (до 5°) и скоростях от нуля до 0,2 синхронных, соответствующих этой частоте, почти равен статическому. Дальнейшее увеличение скорости приводит к значительному уменьшению динамического синхронизирующего момента.
Иногда необходимо перенести угловое значение на расстояние не в одно, а в несколько мест. Например, когда необходимо переместить положение регулирующего органа на главную панель управления и локальные панели регулировки и т.д. Затем несколько приемников сельсина подключаются к одному и тому же источнику данных. Этот режим называется множественным приемом (рис. 12).
Предположим, что к датчику подключено n приемников одного типа. Синхронизирующий момент пропорционален MDS Fmax, последний, в свою очередь, пропорционален току синхронизирующей обмотки Imah. Поскольку приемники подключены к датчику параллельно, синхронизирующий момент приемника будет в n раз меньше момента датчика, так как

В силу снижения моментов у сельсинов-приемников точность передачи будет значительно снижена.
Рис. 12. Схема сельсинов при многократном приеме
Для сохранения синхронизирующего момента приемников датчик сельсина выбран в n раз более мощным, чем приемники сельсина, т.е. сопротивление его обмотки синхронизации будет в n раз меньше сопротивления обмотки синхронизации каждого приемника сельсина. В общем случае

Где – удельный момент при работе одного приемника от однотипного датчика;
Для получения большей точности при передаче угла сельсины приемники выбираются одинаковыми и нагружаются с одинаковым моментом сопротивления.
В рассматриваемых схемах при однофазном питании датчиков и приемников датчик сельсина развивает момент, стремящийся вернуть его ротор в исходное положение. В ряде автоматических устройств синхронная передача угла должна происходить с небольшим синхронизирующим моментом на валу датчика сельсина.
Например, если ротор датчика сельсина механически соединен с чувствительным органом устройства, а момент синхронизации датчика влияет на точность самого устройства. Для компенсации этого момента в цепь обмотки возбуждения приемника сельсина включен фазосдвигающий конденсатор С (рис. 13, а). Фазы потоков магнитного возбуждения в SD и SP смещены на угол, что приводит к уменьшению крутящего момента датчика (рис. 13, б).
Рис. 13. Схема режима индикатора с компенсацией крутящего момента датчика
Трансформаторный режим работы сельсинов
Для передачи углового перемещения или поворота на расстояние с преодолением значительного момента сопротивления используется трансформаторный режим работы сельсинов. При этом по линии связи передается сигнал незначительной мощности, затем сигнал усиливается, вращается исполнительный двигатель, который, перемещая объект управления, одновременно уменьшает угол несоосности между датчиком сельсина и приемником сельсина.
На рисунке 14 показана схема сельсинов в режиме трансформатора. Обмотка возбуждения датчика сельсина, как и в случае индикаторного режима, подключена к питающей сети и служит для создания пульсирующего магнитного потока в магнитной системе машины. Обмотки синхронизации датчика и приемника соединены друг с другом строго соответственно линией связи.
Обмотка возбуждения приемника сельсина предназначена для генерации сигнала (напряжения) в зависимости от угла смещения.
В режиме трансформатора согласованное состояние схемы вызывается, когда обмотка возбуждения приемника сельсина заранее поворачивается относительно обмотки возбуждения датчика сельсина на 90° (на рис. 14 сельсины показаны в согласованном положении). Угол поворота приемника рассчитывается исходя из этого положения.
В трансформаторном режиме сельсины, в зависимости от величины статической погрешности передачи угловых перемещений, делятся на семь классов точности. Статическая погрешность не превышает ±1' для сельсинов высокого класса и достигает +30' для сельсинов низкого класса. В основном сельсины производятся с максимальной погрешностью от +5' до ±30'.
Снижение предельно допустимых погрешностей сельсинов в трансформаторном режиме по сравнению с индикаторным режимом объясняется тем, что точность сельсинов в трансформаторном режиме определяется только их магнитной и электрической симметрией, а не величиной паразитных моментов на валу.

Рис. 14. Схема сельсинов в трансформаторном режиме
Важной характеристикой сельсинов при работе в трансформаторном режиме является удельное выходное напряжение UD при заданном сопротивлении нагрузки ZNAGR, т.е. значение выходного напряжения UV, которое падает на один градус угла наклона, близкого к нулю.
Трансформаторная система дистанционной передачи угла используется для передачи угла поворота на вал рабочего механизма, когда требуется значительный крутящий момент. Основные элементы трансформаторной системы (рис. 15): датчик сельсина - SD, приемник сельсина - SP, усилитель мощности U, исполнительный двигатель IM и коробка передач P, предназначенные для снижения скорости и увеличения крутящего момента. Усилитель мощности U используется для усиления мощности сигнала на выходе приемника сельсина до уровня, достаточного для приведения в действие исполнительного двигателя IM. Система передачи трансформатора представляет собой систему слежения с обратной связью по положению вала регулирующего органа рабочего механизма RO. Коробка передач P системы имеет два выхода: один соединен с валом рабочего механизма, другой - с валом приемника.
Рис. 15. Схема трансформаторной системы для дистанционной угловой передачи
Давайте рассмотрим принцип работы трансформаторной системы. Когда обмотка возбуждения датчика сельсина-ATS подключена к сети, пульсирующий магнитный поток возбуждения индуцирует электродвижущие силы в фазах обмотки синхронизации, величина которых зависит от угла поворота ротора датчика AD относительно продольной оси. Согласованным положением роторов датчика и приемника в системе трансформатора считается положение, когда фазы одноименной обмотки синхронизации сдвинуты относительно друг друга на 90°. Поэтому (рис. 15) угол bP в датчике вычисляется от оси, перпендикулярной оси обмотки возбуждения.
В трансформаторной системе синхронизирующие токи создаются только электродвижущими силами, индуцируемыми в датчике, а не разностью ЭДС, как в индикаторной системе. Токи синхронизации, проходящие через соответствующие фазные обмотки приемника сельсина, создают пульсирующие MDS.
Обмотка возбуждения приемника в трансформаторной системе выполняет функцию обмотки генератора. Сигнал напряжения трансформаторной системы на выходе приемника поступает на вход усилителя мощности Y, выход которого подключен к управляющей обмотке-
В то же время ротор двигателя начинает вращаться, что передается через понижающий редуктор P на вал рабочего механизма RO и на ротор приемника SP. По мере отработки заданного угла AD синхронизация MDS вдоль продольной оси постепенно уменьшается, следовательно, напряжение сигнала уменьшается. После поворота ротора приемника на угол aD выходной сигнал напряжения уменьшится до 0, и система трансформатора придет в равновесие.
Особенностью трансформаторной системы является то, что приемник сельсина этой системы самостоятельно не отрабатывает заданный угол поворота, а только подает сигнал на включение исполнительного двигателя, который проверяет заданный угол поворота. Используя исполнительный двигатель требуемой мощности в системе, можно управлять угловым положением вала рабочего механизма с помощью трансформаторной системы передачи угла.
Дифференциальный сельсин
В системах дистанционной передачи угла используются дифференциальные сельсины, целью которых является воспроизведение угла поворота, равного сумме или разности углов, заданных двумя датчиками сельсина.
Дифференциальный сельсин имеет две трехфазные обмотки, одна из которых расположена в пазах неполюсного статора, а другая - в пазах неполюсного ротора. Вывод обмотки ротора для подключения к внешней сети осуществляется с помощью трех контактных колец и щеток.
Рассмотрим принцип работы системы дистанционного индикации угловой передачи, которая содержит два датчика сельсина SD1 и SD2 и один дифференциальный приемник сельсина SP-SD (рис. 16). Предположим, что ротор дифференциального сельсина заторможен. Когда обмотки возбуждения OV1 и OV2 датчиков SD1 и SD2 сельсина подключены к сети переменного тока, создаются пульсирующие магнитные потоки FV1 и FV2. Поток PV1 индуцирует электродвижущие силы в обмотках фазы синхронизации датчика SD1, под действием которых в в цепях синхронизации этого сельсина появятся токи. Проходя через синхронизирующую обмотку дифференциального сельсина, эти токи создают MDS FDS1. Когда ротор датчика SD1 вращается под углом AD1 по часовой стрелке, вектор MDS FDS1 будет вращаться под тем же углом, но против часовой стрелки.
Аналогичные процессы происходят в цепи синхронизации обмоток датчика SD2 и дифференциального сельсина: когда ротор датчика SD2 вращается по часовой стрелке на угол AD2, вектор MDS FDS2 обмотки ротора дифференциального сельсина также будет вращаться на угол AD2, но против часовой стрелки. В результате между векторами MDS FDS1 и FDS2 дифференциального сельсина появится пространственный угол, равный разности углов, заданных датчиками SD1 и SD2.
Рис. 16. Схема системы индикации дистанционной передачи с дифференциальным сельсином
В результате взаимодействия MDS FDS1 и FDS2 на роторе дифференциального сельсина возникает крутящий момент MD. Следовательно, если ротор дифференциального сельсина SP-DS разомкнут, то под действием момента MD ротор будет вращаться на угол θ так, чтобы векторы MDS FDS1 и FDS2 совпадали в направлении и создавали результирующий магнитный поток в магнитной системе дифференциального сельсина.
Если роторы датчиков SD1 и SD2 повернуты под углами aD1 и aD2 в разные стороны, то ротор дифференциального сельсина будет воспроизводить угол поворота, равный сумме заданных углов:

Особенностью работы индикаторных систем с дифференциальными сельсинами является протекание токов в цепях синхронизации после того, как дифференциальные сельсины отработали заданные углы, т.е. в согласованном состоянии.
Магнесины
магнесин представляет собой электромеханическое устройство, состоящее из тороидального сердечника без канавок, собранного из тонких листов пермаллоя, и спиральной обмотки, намотанной поверх сердечника.
Цилиндрический постоянный магнит расположен внутри тороидального сердечника. Система отображения магнесина состоит из датчика магнесина D и приемника магнесина P. Магниевые обмотки (рис. 17) подключены к сети переменного тока, а их клеммы VD - VP и SD-SP, расположенные под углом 120° относительно друг друга, соединены линией связи. Когда напряжение U1 подается на магнезитовые обмотки в тороидальных сердечниках, будут возникать переменные потоки магнитного возбуждения фотоэлектрических устройств, изменяющиеся во времени с частотой питающей сети f1. Эти потоки индуцируют переменную частоту ЭДС f1 в магниевых обмотках. В момент, когда фотоэлектрические потоки достигают максимального значения, происходит сильное насыщение сердечников и их магнитная проводимость снижается. Таким образом, дважды за один период потоки возбуждения достигают максимальных значений, а магнитная проводимость пульсирует.
Магнитный поток постоянного магнита FP замыкается в сердечнике магнесина, и, поскольку магнитная проводимость сердечника пульсирует, магнитный поток FV также становится пульсирующим и индуцирует переменную ЭДС двойной частоты в обмотке магнесина. Электродвижущие силы EB основной частоты в обмотках магнезитов они не зависят от положения роторов (постоянных магнитов) датчика и приемника и не создают электрических токов в магниевых обмотках. Электродвижущие силы двойной частоты при согласованном положении роторов датчика и приемника создадут одинаковые потенциалы в соответствующих точках одноименных обмоток датчика и приемника. Если ротор датчика повернуть на угол AD, то соединение потока с потоком AF изменится, и потенциалы одноименных точек обмоток датчика и приемника, соединенных проводами линии связи, будут разными.
Рис. 17. Система синхронной связи на магнезитах
В результате в обмотках датчика и приемника системы появятся двухчастотные токи. Эти токи, взаимодействуя с потоком AF в датчике и приемнике, создадут синхронизирующие моменты, которые стремятся повернуть роторы датчика и приемника в согласованное положение, после чего потенциалы одноименных точек обмоток датчика и приемника снова станут одинаковыми, и токи в магниевых обмотках прекратятся. Таким образом, магнесины, как и сельсины, обладают свойством самосинхронизации в пределах одного оборота ротора.
Синхронизирующий момент магнесинов меньше, чем у сельсина, но по конструкции они проще сельсинов, не имеют скользящих контактов и при отсутствии момента нагрузки на вал магнитного приемника обеспечивают высокую точность передачи и воспроизведения заданного угла поворота. Небольшие габаритные размеры и вес магнезитов, высокая точность (δ ≤ ≤ 2,5°) обеспечили их успешное использование в ряде устройств автоматизации на относительно коротких расстояниях передачи.
Применение сельсинов
Все описанные режимы работы сельсинов в синхронных системах связи используются для устройств автоматизации, телемеханики и т.д. Давайте рассмотрим некоторые примеры использования сельсинов.
сельсины, работающие в режиме индикатора, как указано, используются для передачи углового или линейного перемещения на панель управления.
На рисунке 18 показана схема передачи положения управляющего стержня ядерного реактора. Управляющий стержень реактора механически соединен с ротором датчика сельсина SD через реечную передачу RP, которая преобразует линейное перемещение в угловое перемещение. Приемник сельсина совместного предприятия расположен на панели управления реактором, а стрелка индикатора положения штока закреплена на валу его ротора. Деревни соединены линией электрической связи. Выбрав соответствующую систему передач, вы можете добиться высокой точности индикации положения штока. В этой системе один приемник работает от одного датчика.
В некоторых случаях множественный прием происходит, когда несколько приемников работают от одного датчика, например, датчика радиоактивного уровня UR-4 завода "Физприбор", схема которого показана на рис.
19. В этом устройстве два приемника сельсина SP1 и SP2 работают от одного датчика сельсина SD. Источник радиоактивного излучения механически соединен с приемником SP1 сельсина, а счетчик ядерных частиц установлен на роторе приемника SP2 сельсина.
Когда измерительные источники находятся на границе раздела двух сред (уровень вещества), сигнал не поступает в усилитель, и система находится в состоянии покоя. Если, например, уровень вещества снизится, то в измеритель попадет большое излучение и сигнал определенной фазы попадет на усилитель. Ротор асинхронного двигателя ID начнет вращаться, вращать ротор датчика сельсина и одновременно стрелку вторичного устройства, указывающего уровень вещества. Синхронно с датчиком сельсина приемники сельсина начнут двигаться, перемещая источник и счетчик после уровня. Система будет перемещаться (отслеживаться) до тех пор, пока линия источник-счетчик снова не достигнет уровня разделения двух сред.
Стрелка вторичного устройства будет указывать уровень вещества.
Рис. 18. Схема передачи положения управляющего стержня ядерного реактора
Часто сельсины в режиме индикатора работают с непрерывным вращением датчика и приемника. Примером может служить схема передачи данных курсового угла от антенны к радиолокационному индикаторному устройству радиолокационной станции. Схема такого устройства показана на рис. 20.
Вал антенны A вращается двигателем ID и соединен с ротором датчика сельсина SD через ускоряющую коробку передач Ed.1 с передаточным отношением Z = 30.
Ротор приемника сельсина SP через замедляющий редуктор Ed.2 с передаточным отношением Z = 30 соединен с механизмом вращения отклоняющей катушки MVK (сама катушка обозначена OK). Обмотки возбуждения сельсина подключены к сети переменного тока напряжением 115 В, частотой 427 Гц.
Приемник сельсина вращается синхронно и в фазе с датчиком сельсина, обеспечивая синхронное и в фазе вращение линии сканирования сигнала на экране индикатора с антенной радара.
Рассмотрим идеальный случай, когда КПД коробок передач равен единице, а погрешность передачи их углового перемещения равна нулю.
Рис. 19. Схема датчика радиоактивного уровня UR-4
Использование ускоряющей передачи в антенне и замедляющей передачи в индикаторе уменьшает момент сопротивления, создаваемый механизмом вращения катушки MVK на оси ротора приемника, в i раз, т.е. в данном случае в 30 раз, и погрешность передачи курсового угла, связанную с моментом сопротивления от MVK, в i2 раза. Это связано с тем, что погрешность совместного предприятия уменьшается в i раз с заданного момента сопротивления и в i раз погрешность положения ротора СП, соединенного с валом антенны, уменьшается.
Рис. 20. Схема радиолокационного устройства для передачи курсового угла
Но введение такой передачи приводит к потере свойства самосинхронизации системы. Предположим, что датчик сельсина SD не соответствует приемнику сельсина SP (например, в результате отключения источника питания). При подаче питания вал MVK может занимать одно из стабильных положений, когда момент сельсина приемника равен нулю. При принятых передаточных числах определенное положение антенны A может соответствовать 30 стабильным положениям отклоняющей катушки, отличающимся углами, кратными 12°, поскольку на каждые 12° угла поворота OK ротор приемника сельсина совершает полный оборот (360°) и снова попадает в устойчивое положение равновесия относительно датчика сельсина. Для реализации самосинхронизации в системе используется схема автоматической самосинхронизации, состоящая из двух синусно-косинусных вращающихся трансформаторов SKPT, механически соединенных с антенной и отклоняющей катушкой, реле RL и усилителя реле UL.
Обмотки статора SKPT C1C2 подключены к источнику питания переменного тока 115 В, 427 Гц; обмотки C3C4 закорочены для симметрии SKPT. Вращающиеся обмотки P1P2 включаются в соответствии со схемой сравнения сигналов. Напряжение с этих обмоток подается на релейный усилитель U-1, нагрузкой которого является реле P- 1.
Когда антенна и отклоняющая катушка вращаются синхронно и в фазе, сигнал на выходе вращающихся обмоток SKPT близок к нулю, и реле разомкнуто. При смещении поворота на угол > +5° появляется сигнал смещения, срабатывает реле P-1 и обмотка синхронизации приемника сельсина замыкается до сопротивления R1 = 100 Ом (для быстрой остановки). Приемник сельсина будет оставаться в состоянии покоя до тех пор, пока антенна не попадет в соответствующий сектор. Когда ось диаграммы излучения антенны совпадет по фазе с линией развертки сигнала, реле Р-1 потеряет питание, разомкнет контакты, обмотки синхронизации сельсина соединятся, и приемник сельсина снова начнет вращать отклоняющую катушку синхронно и в фазе с антенной.
Рис. 21. Схема маломощной системы слежения
Различные устройства автоматизации часто требуют значительного крутящего момента на ведомом валу при незначительном крутящем моменте на управляющем валу. В таких системах сельсины используются в трансформаторном режиме.
На рисунке 21 показана структурная схема системы слежения с сельсинами в режиме трансформатора. Выходное напряжение приемника сельсина подается через усилитель U на исполнительный двигатель ID, который вращает объект управления OP, а вместе с ним и ротор приемника сельсина на угол, установленный датчиком. После поворота операционного усилителя и ротора приемника под одинаковым углом магнитный поток приемника операционного усилителя снова будет перпендикулярен оси выходной обмотки, выходное напряжение станет равным нулю, и система окажется в новом положении устойчивого равновесия.
Природа ошибок при работе системы синхронной передачи и средства повышения точности
Источниками ошибок в работе синхронной системы передачи с однофазными сельсинами являются паразитные поперечные магнитные потоки, направленные перпендикулярно оси обмотки возбуждения и возникающие по ряду причин. Эти потоки вызывают асимметрию кривой пространственного распределения магнитного поля относительно оси обмотки возбуждения. Дополнительными источниками ошибок в индикаторных сельсинах- приемниках являются момент трения в подшипниках и щетках и неточность балансировки ротора. Появление паразитных поперечных магнитных потоков и связанных с ними ошибок в работе сельсинов обусловлено
несовершенством технологии и конструктивными ограничениями. Несовершенство технологии может привести к неоднородности магнитных свойств стального пакета в разных направлениях, к короткозамкнутым виткам в обмотках и стальном пакете, к неравенству числа витков фазы и их активного и индуктивного сопротивлений, к неравномерному воздушному зазору из-за эксцентричного положения ротора в статоре, а также к эллипсоидальным отходам последнего.
Конструктивные ограничения проявляются в несинусоидальности пространственной кривой МДС и поля вследствие несовершенства обмоток и зубчатого строения статора и ротора, а также насыщения магнитной цепи. Все ошибки сельсинов, за исключением ошибки от момента трения, при повороте ротора изменяются периодически. Число периодов изменения ошибок за один оборот ротора для различных их видов может быть: от неточной балансировки ротора – один период (p=l), от несовершенства технологии – два периода (k = 2), от несинусоидальности пространственной кривой МДС вследствие несовершенства обмотки – шесть периодов (fe= 6). В общем случае k= 2m2. Максимум этой ошибки имеет место в положениях ротора, когда угол между осями обмоток фаз статора и ротора составляет

где t2 - количество фаз синхронизирующей обмотки.
Количество периодов отклонения погрешности от зубчатых гармоник поля за один оборот ротора равно z-1 и z+1, где z - количество пазов. При тестировании сельсинов вы можете определить их природу по количеству периодов изменения ошибок. Ошибки от несинусоидальности пространственной кривой MDS в индикаторных сельсинах проявляются в меньшей степени, чем в трансформаторных сельсинах, поскольку индикаторные сельсины имеют двустороннее питание.
В динамическом режиме работы индикаторных сельсинов периодические изменения момента тяжести при неточной балансировке ротора и паразитных поперечных потоках приводят к вынужденным колебаниям ротора приемника. В этом случае величина погрешности будет определяться суммарной амплитудой этих колебаний. При некоторых критических скоростях вращения, когда частота вынужденных колебаний становится равной частоте собственных колебаний, возникает явление резонанса, и нормальная работа системы становится невозможной.
Критическая скорость вращения определяется уравнением
где nОК – критическая скорость вращения, об/мин,
mУ – удельный синхронизирующий момент, кг·см/град,
J – момент инерции ротора, кг·см2, g = 981 см/сек2,
k – число периодов изменения вынуждающихся сил за один оборот ротора, которое составляет:
k = 1 – для момента сил тяжести при неуравновешенном роторе,
k = 2 – для поперечных потоков, обусловливаемых технологическими неточностями,
k = 6 – для поперечных потоков, обусловливаемых несинусоидальностью МДС,
k = z – 1 и k = z+1 – для поперечных потоков, обусловливаемых зубчатым строением.
При неравномерной скорости вращения возникает ошибка из-за момента инерции ротора приемника.
Погрешность, вызванная моментом инерции ротора приемника, обратно пропорциональна коэффициенту динамической добротности сельсина.
Ошибка, вызванная моментом трения в подшипниках и щетках приемника сельсина. Погрешность, вызванная моментом трения, обратно пропорциональна статической добротности.
Трансформаторные системы синхронной передачи обладают более высокой точностью работы, чем индикаторные, так как они не показывают ошибок, вызванных механическими причинами: моментом трения, инерцией и дисбалансом ротора. Повышение точности сельсинов трансформатора может быть достигнуто за счет уменьшения ошибок, вызванных технологическими и структурными причинами.
Ошибки selsin трансформатора вызваны несинусоидальностью пространственной кривой MDS. Ошибки сельсина трансформатора, вызванные конструкцией зубчатого колеса статора.
Ошибки, вызванные зубчатой конструкцией ротора или той частью, где расположена выходная обмотка, при правильном выборе соотношения количества пазов статора и ротора, практически не проявляются. Поэтому размер скоса канавок следует выбирать из соображений демпфирования зубчатых гармоник статора или части, где расположена обмотка синхронизации. Вы можете выбрать наиболее рациональную конструкцию обмоток статора и ротора и размер конических канавок, обеспечивая минимальную погрешность из-за конструктивных ограничений.
В трансформаторных сельсинах желательно избегать явления насыщения магнитного сердечника, особенно зоны зубьев, и использовать пермаллой в качестве магнитного материала.
Наличие короткозамкнутой демпфирующей обмотки в датчике трансформатора selsin способствует значительному повышению точности трансформаторной системы, поскольку эта обмотка экранирует поперечный магнитный поток.
Для повышения точности индикаторных сельсинов при их проектировании рекомендуется следовать следующим рекомендациям:
-
Минимизация момента трения и момента инерции ротора приемника сельсина.
-
Увеличение удельного синхронизирующего момента за счет увеличения магнитной индукции в воздушном зазоре до допустимых пределов.
-
Использование скошенных пазов статора или ротора для сельсиновдатчиков и приемников на одном и том же делении паза.
-
Использование скошенных пазов статора и ротора для сельсиновдифференциалов в противоположных направлениях.
-
Выбор значения коэффициента перекрытия полюсов для однополюсных сельсинов из условия
m2 q целому числу,
где т2 – число фаз,
q – число пазов, приходящихся на полюс и фазу.
Выбор соотношения чисел пазов статора и ротора неявнополюсных сельсинов по следующим неравенствам:

где g - любое целое число; Z1 - количество пазов статора; Z2 - количество пазов ротора.
-
Использование двухслойных обмоток с шагом уменьшения около 1/5 от деления полюсов. В однополюсных сельсинах на статоре и роторе должны быть выполнены двухслойные обмотки, при этом одна обмотка должна иметь уменьшение шага примерно на 1/5, а другая - примерно на 1/7 от деления полюсов.
-
Увеличение количества пазов статора (и ротора).
-
Обеспечение отсутствия механического резонанса ротора приемника сельсина в динамическом режиме работы системы индикации синхронной передачи.
-
Использование высококачественной технологии изготовления сельсинов.
Для повышения точности трансформаторных сельсинов рекомендуется при их проектировании следовать следующим рекомендациям:
-
Использование высококачественной технологии изготовления сельсинов: тщательное изготовление обмоток с последующей проверкой отсутствия замыканий цепи и асимметрии фазового сопротивления; веерообразная сборка стального пакета; исключение эксцентриситета ротора и эллипсоидной окружности отверстия статора.
-
Использование конструкции с неявным полюсом для трансформаторных сельсинов с наличием распределенной демпфирующей обмотки на датчике сельсина.
-
Увеличение количества пазов статора и ротора.
-
Выбор выгодного соотношения количества пазов статора и ротора в соответствии с рекомендациями.
-
Исключение явления насыщения магнитопровода, особенно зоны зуба.
-
Использование пермаллоя в качестве магнитного материала.
-
Увеличение воздушного зазора и уменьшение ширины прорезей пазов.
-
Выбор рациональных типов обмоток, обеспечивающих минимальную погрешность. Подбор размера скоса пазов статора в соответствии с рекомендациями.
Наилучший вариант скоса определяется путем предварительного сравнения значений погрешности, определенных расчетами.
Ошибки индикаторной синхронной передачи
Синхронизирующий момент приемника сельсина пропорционален углу смещения и в согласованном положении датчика и приемника равен нулю, поэтому наличие даже наименьшего тормозного момента, приложенного к ротору приемника, приводит к некоторой ошибке в синхронной передаче.
Существует два типа ошибок в синхронных передачах индикаторов: статические и динамические. Статическая погрешность определяется в режиме вращения (ap = 0), и ее значение определяется из уравнения

или при малом угле рассогласования
Тормозной момент приемника в режиме поворота может быть записан в виде

где МТР – момент сухого трения;
МНЕБ – максимальное значение момента от небаланса ротора со стрелкой;
Мr – максимальный реактивный момент от электромагнитной асимметрии магнитопровода приемника;
МZ – максимальное значение момента от зубцовых пульсаций магнитного потока.
Последние выражения дают приблизительную зависимость статической погрешности приемника сельсина от углового положения ротора и позволяют определить по экспериментально снятой кривой погрешности, какой из факторов, влияющих на погрешность, является наиболее значительным. Так, например, если кривая погрешности имеет двукратную частоту на оборот ротора приемника, то основное влияние на погрешность оказывает электромагнитная асимметрия магнитопровода.
В зависимости от величины статической погрешности индикаторные синхронные передачи делятся на классы точности.
|
Класс точности |
1 |
2 |
3 |
|
Максимальная статическая ошибка в градусах |
0,5 |
1,0 |
1,5 |
|
Класс точности |
1 |
2 |
3 |
|
Максимальная динамическая ошибка в градусах |
0,5 |
1,0 |
1,5 |
Динамическая погрешность синхронной передачи индикатора определяется, когда ротор датчика вращается по заданному закону; обычно принимается синусоидальный закон движения с определенной амплитудой и угловой частотой.
Ошибки трансформаторной синхронной передачи
При использовании
"идеализированных" сезонов в синхронной трансформаторной передаче управляющее напряжение в режиме синхронного вращения зависит только от угла смещения, поэтому такая синхронная передача не имеет ошибок. Когда синхронная передача находится в режиме вращения, а также в тех случаях когда характеристики используемых сельсинов отличаются от идеальных, на управляющей обмотке появляется дополнительное напряжение, которое не исчезает при нулевом угле смещения. Это дополнительное напряжение ΔUu обычно не совпадает по фазе с управляющим напряжением.
Величина ошибки зависит как от положения ротора приемника относительно статора (статическая ошибка), так и от угловой скорости сельсинов (ошибка скорости). Давайте кратко рассмотрим основные факторы, определяющие скорость и статические погрешности синхронной трансформаторной передачи.
a. Погрешность скорости синхронной передачи трансформатора Значение управляющей ЭДС приемника в
режиме вращения пропорционально текущему идентификатору. Он состоит из двух частей: первая часть, пропорциональная SIN, представляет собой ЭДС трансформатора, зависящую от угла смещения; вторая часть, пропорциональная угловой скорости сельсинов, представляет собой ЭДС вращения. Составляющая ЭДС вращения, совпадающая по фазе с ЭДС трансформатора, определяет величину погрешности скорости.
Погрешность скорости приемника сельсина при синхронной передаче трансформатора пропорциональна скорости сельсина и зависит от соотношения активного и индуктивного сопротивлений схемы синхронизации сельсина. Чтобы уменьшить погрешность скорости, необходимо переключиться на повышенную частоту, при этом как соотношение активного и реактивного сопротивлений, так и относительная угловая скорость сельсинов уменьшаются.
Одним из способов снижения погрешности скорости в системах слежения является сдвиг фазы опорного напряжения фазочувствительного усилителя таким образом, чтобы оно оказалось в квадратуре с ЭДС вращения. Однако наблюдается небольшое снижение эффективной крутизны управляющей ЭДС.
б. Статические ошибки в синхронной передаче трансформатора Статические ошибки в синхронной передаче трансформатора вызваны двумя факторами: несинусоидальным распределением магнитный поток и n. s. обмотки и неточность изготовления сельсинов. Несинусоидальное распределение магнитного потока и магнитного потока проявляется в том, что на кривой индукции магнитного поля в воздушном зазоре, помимо основной гармоники, присутствуют все нечетные гармоники. 3-я, 9-я и все кратные трем гармоники индуцируют одинаковую ЭДС в фазах
трехфазной обмотки, и ЭДС на выходе отсутствует, когда обмотки подключены к звезде. Поэтому на работу трехфазных сельсинов влияют только гармоники порядков 6k ± 1, где k = 1, 2, 3 и т.д.
Когда ротор сельсина вращается, пространственные гармоники также перемещаются: гармоники порядков 6k - 1 - против направления вращения ротора, а гармоники порядков 6k + 1 - в направлении вращения ротора с относительной скоростью (относительно ротора), обратно пропорциональной количеству гармоник.
Выбирая схему намотки, скос канавки, ширину дуги полюса, статическую погрешность от несинусоидального распределения магнитного поля можно уменьшить до нескольких угловых минут.
Статические погрешности из-за неточности изготовления сельсинов обусловлены: асимметрией магнитопровода, наличием короткозамкнутых витков, эксцентриситетом, неравенством параметров фаз обмотки синхронизации.
В случае магнитной асимметрии пакета статора его можно представить в виде магнитопровода, имеющего эллиптическое отверстие. При изменении углового положения ротора ось его магнитного потока будет смещаться относительно ротора в направлении наибольшей магнитной проводимости. В результате возникнет ошибка, которая изменяется с удвоенной частотой в зависимости от угла поворота ротора.
Аналогичное явление будет наблюдаться при наличии замкнутого контура в магнитной цепи. Под воздействием замкнутого контура, когда ротор вращается, изменяется как величина магнитного потока, так и его фаза. Эти изменения будут происходить с удвоенной частотой в зависимости от угла поворота ротора.
Неравенство фазовых параметров синхронизирующих обмоток приводит к появлению статических ошибок, которые также изменяются с двумя-частота зависит от угла поворота ротора. Это позволяет за счет включения дополнительных активных сопротивлений, индуктивности и емкости в схему синхронизации в некоторой степени компенсировать статические ошибки, вызванные неточностями изготовления и остаточной ЭДС управляющей обмотки.
В зависимости от максимального значения статической погрешности трансформаторные синхронные передачи делятся на шесть классов.
|
Класс точности |
1 |
2 |
3 |
4 |
5 |
6 |
|
Максимальная статическая ошибка в угловых минутах |
±1 |
±2 |
±5 |
±10 |
±20 |
±30 |
На какие вопросы может ответить эта статья:
-
Какие типы систем и типы синхронных коммуникационных машин используются в системах промышленной автоматизации?
-
Через какие элементы последовательно проходит магнитный поток в бесконтактном сельсине?
-
Каков принцип работы системы индикаторов синхронной связи?
-
Каков принцип работы сельсинов в трансформаторной синхронной системе связи?
-
Назовите факторы, определяющие точность сельсинов в индикаторной синхронной системе связи.
-
Назовите факторы, определяющие точность трансформаторной синхронной системы связи.
-
На какие классы делятся сельсины в режиме индикатора по точности?
-
Что называется конкретным синхронизирующим моментом?
-
Как определяется погрешность сельсинов в режимах индикатора и трансформатора?
-
Каковы причины величины угла смещения в системе индикаторов угловой передачи?
-
Что изменится в работе индикаторной системы, если поменять местами провода, подключенные к обмотке синхронизации или к обмотке возбуждения совместного предприятия?
-
Из каких элементов состоит система передачи угла трансформатора?
-
Какой угол поворота воспроизводит дифференциальный сельсин?
-
Какова статическая точность сельсинов?
-
Какова динамическая точность сельсинов?
-
Каково предпочтительное количество пар полюсов в сельсинах (p=1, 2, 3, ...)?
-
В чем разница между дифференциальным сельсином и однофазным сельсином по назначению?
-
В чем разница между дифференциальным сельсином и однофазным сельсином по конструкции?
-
Для каких целей предпочтительны явные и неявные полярные версии сельсина?
-
Какой материал используется для колец и щеток в контактном сельсине?
-
Каково конкретное выходное напряжение?
-
Что подразумевается под повторным приемом индикаторного режима сельсинов?
-
Какие условия должны быть выполнены для многократного приема режима индикатора?
-
Как компенсировать синхронизирующий момент датчика в режиме индикатора?
-
На какие классы делятся сельсины в режиме трансформатора по точности?
-
Какие обмотки выполнены в дифференциальном сельсине и где они расположены?
-
В каком режиме работы – индикаторном или трансформаторном – используются дифференциальные сельсины?
-
магнесин, назначение, устройство.
-
В каком режиме работы – индикаторном или трансформаторном - используются магнесины?
-
Приведите примеры использования сельсинов в технологии.
-
Перечислите основные причины ошибок в системах синхронной передачи с однофазными сельсинами.
-
Каким рекомендациям следует следовать для повышения точности индикации режима работы сельсинов?
-
Каких рекомендаций следует придерживаться для повышения точности трансформаторного режима работы сельсинов?
-
Что такое "ошибка скорости" синхронной трансформаторной передачи?
-
Что вызывает статические ошибки синхронной трансформаторной передачи?
-
Какие классы точности предусмотрены для трансформаторных синхронных передач?
Достижения науки и техники, обусловленные ускорением научно-технического прогресса, способствуют постоянному совершенствованию автоматических систем и, в первую очередь, их элементной базы. Это также относится к электрическим машинам для автоматических устройств. Совершенствование элементов автоматизации электрических машин осуществляется в двух направлениях. Во-первых, используются высококачественные магнитные и электроизоляционные материалы, что способствует повышению технико-экономических показателей электрических машин. Или использование магнитно-твердых материалов в машинах с постоянными магнитами, использующих редкоземельные элементы. Магнитная энергия постоянных магнитов, изготовленных из таких материалов, почти в 6 раз выше, чем у магнитов из сплава типа alnico.
Во-вторых, создаются новые, более рациональные конструкции электрических машин. Опыт эксплуатации элементов электрических машин исследования в области автоматизации показали, что наиболее перспективными конструкциями, не имеющими скользящих электрических контактов, являются бесконтактные машины. Такие машины, обладая высокой надежностью и стабильностью характеристик, способны работать при значительных колебаниях внешних воздействий (температура, влажность, вибрация и т.д.) во взрывоопасных и пожароопасных средах, в условиях вакуума и при больших динамических перегрузках. Эти свойства позволяют успешно эксплуатировать такие машины в транспортных средствах и других устройствах. Примером бесконтактных электрических машин, которые успешно используются в современной автоматизации, являются бесконтактные сельсины, бесконтактные двигатели постоянного тока.
Современный автоматизированный электропривод постоянно совершенствуется в направлении увеличения его быстродействия с целью повышения точности обработки заданных параметров. Динамические свойства такого электропривода во многом определяются инерционными свойствами исполнительных двигателей. Поэтому задача создания еще более совершенных конструкций остается актуальной. Совершенствование существующих и создание новых конструкций электрических машин для автоматических устройств, надежных в эксплуатации и обладающих более высокими технико-экономическими показателями, является важной задачей в развитии комплексной промышленной автоматизации.
СПИСОК ЛИТЕРАТУРЫ
- Армейский Е.В., Фалк Г.Б. Электрические микромашины. – М.: Высш. школа, 1975. Астахов Н.В. и др. Испытания электрических микромашин. – М.: Высш. школа, 1973.
- Кононенко Е.В. Синхронные реактивные машины. – М.: Энергия, 1970.
- Лопухина Е.М., Сомихина Г.С. Асинхронные микромашины с полым ротором. – М.: Энергия, 1967.
- Микроэлектродвигатели для систем автоматики. Технический справочник / Под ред. Э.А. Лодочникова, Ф.М. Юферова. – М.: Энергия, 1969.
- Овчинников И.Е., Лебедев Н.И. Бесконтактные двигатели постоянного тока автоматических устройств. – М.-Л.: Наука, 1966.
- Хрущев В.В. Электрические микромашины автоматических устройств. – Л.: Энергия, 1976. Чечет Ю.С. Электрические микромашины автоматических устройств. – М.-Л.: Энергия, 1964. Юферов Ф.М. Электрические машины автоматических устройств. – М.: Высш. школа, 1976. Электрические машины. Ч. I и II. – М.: Изд-во стандартов, 1973.
- Хрущев В.В. Электрические машины систем автоматики: учебник для вузов. – 2-изд., перераб. и доп. – Л.: Энергоатомиздат, Ленингр. отд-е, 1985. – 368 с.
- Кацман М.М. Электрические машины и электропривод автоматических устройств: учебник для электротехнических специальностей техникумов.– М.: Высш. шк., 1987. – 335 с.