ГОСТ 2.781-96
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
ЕДИНАЯ СИСТЕМА КОНСТРУКТОРСКОЙ
ДОКУМЕНТАЦИИ
ОБОЗНАЧЕНИЯ УСЛОВНЫЕ
ГРАФИЧЕСКИЕ.
АППАРАТЫ ГИДРАВЛИЧЕСКИЕ И ПНЕВМАТИЧЕСКИЕ,
УСТРОЙСТВА УПРАВЛЕНИЯ И ПРИБОРЫ
КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНЫЕ
МЕЖГОСУДАРСТВЕННЫЙ СОВЕТ
ПО СТАНДАРТИЗАЦИИ, МЕТРОЛОГИИ И СЕРТИФИКАЦИИ
Минск
Предисловие
1 РАЗРАБОТАН научно-исследовательским и проектно-конструкторским институтом промышленных гидроприводов и гидроавтоматики (НИИГидропривод), Всероссийским научно-исследовательским институтом стандартизации и сертификации в машиностроении (ВНИИНМАШ)
ВНЕСЕН Госстандартом России
2 ПРИНЯТ Межгосударственным Советом по стандартизации, метрологии и сертификации (протокол № 10 от 4 октября 1996 г.)
За принятие проголосовали:
|
Наименование государства |
Наименование национального органа по стандартизации |
|
Азербайджанская Республика |
Азгосстандарт |
|
Республика Армения |
Армгосстандарт |
|
Республика Белоруссия |
Белстандарт |
|
Республика Казахстан |
Госстандарт Республики Казахстан |
|
Киргизская Республика |
Киргизстандарт |
|
Республика Молдова |
Молдовастандарт |
|
Российская Федерация |
Госстандарт России |
|
Республика Таджикистан |
Таджикский государственный центр по стандартизации, метрологии и сертификации |
|
Туркменистан |
Туркменглавгосинспекция |
|
Украина |
Госстандарт Украины |
3 Настоящий стандарт соответствует ИСО 1219-91 «Гидропривод, пневмопривод и устройства. Условные графические обозначения и схемы. Часть 1. Условные графические обозначения» в части направляющих и регулирующих аппаратов, устройств управления и контрольно-измерительных приборов
4 Постановлением Государственного комитета Российской Федерации по стандартизации, метрологии и сертификации от 7 апреля 1997 г. № 122 межгосударственный стандарт ГОСТ 2.781-96 введен в действие непосредственно в качестве государственного стандарта Российской Федерации с 1 января 1998 г.
5 ВЗАМЕН ГОСТ 2.781-68
6 ПЕРЕИЗДАНИЕ. Ноябрь 2004 г.
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Единая система конструкторской документацииОБОЗНАЧЕНИЯ УСЛОВНЫЕ ГРАФИЧЕСКИЕ Аппараты гидравлические и пневматические, устройства управления и приборы
|
Дата введения 1998-01-01
1 ОБЛАСТЬ ПРИМЕНЕНИЯ
Настоящий стандарт устанавливает условные графические обозначения направляющих и регулирующих аппаратов, устройств управления и контрольно-измерительных приборов в схемах и чертежах всех отраслей промышленности.
Условные графические обозначения аппаратов, не указанных в настоящем стандарте, строят в соответствии с правилами построения и приведенными примерами.
2 НОРМАТИВНЫЕ ССЫЛКИ
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ 2.721-74 ЕСКД. Обозначения условные графические в схемах. Обозначения общего применения
ГОСТ 17752-81 Гидропривод объемный и пневмопривод. Термины и определения
ГОСТ 20765-87 Системы смазочные. Термины и определения
3 ОПРЕДЕЛЕНИЯ
В настоящем стандарте применяют термины по ГОСТ 17752 и ГОСТ 20765.
4 ОСНОВНЫЕ ПОЛОЖЕНИЯ
4.1 Обозначения отражают назначение (действие), способ работы устройств и наружные соединения.
4.2 Обозначения не показывают фактическую конструкцию устройства.
4.3 Если обозначение не является частью схемы, то оно должно изображать изделие в нормальном или нейтральном положении (в положении «на складе»).
4.4 Обозначения показывают наличие отверстий в устройстве, но не отражают действительное месторасположение этих отверстий.
4.5 Применяемые в обозначениях буквы представляют собой только буквенные обозначения и не дают представления о параметрах или значениях параметров.
4.6 Размеры условных обозначений стандарт не устанавливает.
4.7 Общие принципы построения условных графических обозначений гидро- и пневмоаппаратов приведены в таблице 1.
Таблица 1
|
Наименование |
Обозначение |
|
1 Базовое обозначение: квадрат (предпочтительно) и прямоугольник |
|
|
2 Обозначения гидро- и пневмоаппаратов составляют из одного или двух и более квадратов (прямоугольников), примыкающих друг к другу, один квадрат (прямоугольник) соответствует одной дискретной позиции |
|
|
3 Линии потока, места соединений, стопоры, седельные затворы и сопротивления изображают соответствующими обозначениями в пределах базового обозначения: |
|
|
- линии потока изображают линиями со стрелками, показывающими направления потоков рабочей среды в каждой позиции |
|
|
- места соединений выделяют точками |
|
|
- закрытый ход в позиции распределителя |
|
|
- линии потока с дросселированием |
|
|
4 Рабочую позицию можно наглядно представить, перемещая квадрат (прямоугольник) таким образом, чтобы внешние линии совпали с линиями потока в этих квадратах (прямоугольниках) |
|
|
5 Внешние линии обычно изображают через равные интервалы, как показано. Если имеет место только одна внешняя линия с каждой стороны, то она должна примыкать к середине квадрата (прямоугольника) |
|
|
6 Переходные позиции могут быть обозначены, если это необходимо, как показано, прерывистыми линиями между смежными рабочими позициями, изображенными сплошными линиями |
|
|
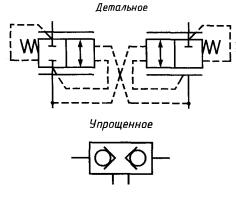
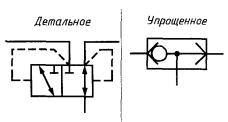
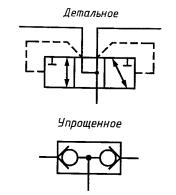
7 Аппараты с двумя или более характерными рабочими позициями и с бесчисленным множеством промежуточных позиций с изменяемой степенью дросселирования изображают двумя параллельными линиями вдоль длины обозначения, как показано. Для облегчения вычерчивания эти аппараты можно изображать только упрощенными обозначениями, приведенными ниже. Для составления полного обозначения должны быть добавлены линии потоков: |
Две крайние позиции С центральной (нейтральной) позицией |
|
- двухлинейный, нормально закрытый, с изменяющимся проходным сечением |
|
|
- двухлинейный, нормально открытый, с изменяющимся проходным сечением |
|
|
- трехлинейный, нормально открытый, с изменяющимся проходным сечением |
|
4.8 Общие правила построения условных графических обозначений устройств управления приведены в таблице 2.
Таблица 2
|
Наименование |
Обозначение |
|
1 Обозначения управления аппаратом могут быть вычерчены в любой удобной позиции с соответствующей стороны базового обозначения аппарата |
|
|
2 Обозначение элементов мускульного и механического управления по ГОСТ 2.721 |
|
|
3 Линейное электрическое устройство Например, электромагнит (изображение электрических линий необязательно): |
|
|
- с одной обмоткой, одностороннего действия |
|
|
- с двумя противодействующими обмотками в одном узле, двухстороннего действия |
|
|
- с двумя противодействующими обмотками в одном узле, каждая из которых способна работать попеременно в рабочем режиме, двухстороннего действия |
|
|
4 Управление подводом или сбросом давления |
|
|
4.1 Прямое управление: |
|
|
- воздействие на торцовую поверхность (может быть осуществлено подводом или сбросом давления) |
|
|
- воздействие на торцовые поверхности разной площади (если необходимо, соотношение площадей может быть указано в соответствующих прямоугольниках) |
|
|
- внутренняя линия управления (канал управления находится внутри аппарата) |
|
|
- наружная линия управления (канал управления находится снаружи аппарата) |
|
|
4.2 Пилотное управление (непрямое управление): |
|
|
- с применением давления газа в одноступенчатом пилоте (с внутренним подводом потока, без указания первичного управления) |
|
|
- со сбросом давления |
|
|
- с применением давления жидкости в двухступенчатом пилоте последовательного действия (с внутренним подводом потока управления и дренажом, без указания первичного управления) - двухступенчатое управление, например, электромагнит и одноступенчатый, пневматический пилот (наружный подвод потока управления) |
|
|
- двухступенчатое управление, например, пневмогидравлический пилот и последующий гидравлический пилот (внутренний подвод потока управления, наружный дренаж из гидропилота без указания первичного управления) |
|
|
- двухступенчатое управление, например, электромагнит и гидравлический пилот (центрирование главного золотника пружиной; наружные подвод потока управления и дренаж) |
|
|
4.3 Наружная обратная связь (соотношение заданного и измеренного значений контролируемого параметра регулируется вне аппарата) |
|
|
4.4 Внутренняя обратная связь (механическое соединение между перемещающейся частью управляемого преобразователя энергии и перемещающейся частью управляющего элемента изображено с использованием линии механической связи; соотношение заданного и измеренного значений контролируемого параметра регулируется внутри аппарата) |
|
|
4.5 Применение обозначений механизмов управления в полных обозначениях аппаратов: |
|
|
- обозначения механизмов управления одностороннего действия изображают рядом с обозначением устройства, которым они управляют, таким образом, чтобы сила воздействия механизма мысленно перемещала обозначение устройства в другую позицию |
|
|
- для аппаратов с тремя или более позициями управление внутренними позициями может быть пояснено расширением внутренних границ вверх или вниз и прибавлением к ним соответствующих обозначений механизмов управления |
|
|
- обозначения механизмов управления для средней позиции трехпозиционных аппаратов могут быть изображены с внешней стороны крайних квадратов (прямоугольников), если это не нарушит понимания обозначения |
|
|
- если механизм управления является центрирующим с помощью давления в нейтральной позиции, то изображают два отдельных треугольника по обеим внешним сторонам |
|
|
- внутренний пилот и дренажные линии аппаратов с непрямым управлением обычно не включают в упрощенные обозначения |
|
|
- если имеется один наружный пилот и/или одна дренажная линия в гидроаппаратах с непрямым управлением, то их показывают только с одного конца упрощенного обозначения. Дополнительный пилот и/или дренаж должны быть изображены на другом конце. На обозначениях, нанесенных на устройство, должны быть указаны все внешние связи |
|
|
- при параллельном управлении (ИЛИ) обозначения механизмов управления показывают рядом друг с другом: например, электромагнит или нажимная кнопка независимо воздействуют на аппарат |
|
|
- при последовательном управлении (И) обозначения ступени последовательного управления показывают в линию, например, электромагнит приводит в действие пилот, который приводит в действие основной аппарат |
|
|
- фиксатор изображают количеством позиций и в порядке, соответствующем позициям управляемого элемента; выемки показаны только в тех позициях, в которых происходит фиксация. Черточку, показывающую фиксатор, изображают в соответствии с начерченной позицией аппарата |
|
4.9 Примеры построения условных графических обозначений аппаратов приведены в таблице 3.
Таблица 3
|
Наименование |
Обозначение |
|
1 Распределитель 2/2 (в сокращенных записях распределители обозначают дробью, в числителе которой цифра показывает число основных линий, т.е. исключая линии управления и дренажа, в знаменателе - число позиций |
|
|
- запорный двухлинейный, двухпозиционный с мускульным управлением |
|
|
- с одноступенчатым пилотным управлением. Пилотная ступень. Четырехлинейный, двухпозиционный распределитель, управляемый электромагнитом и возвратной пружиной, давление управления - со стороны торцевой кольцевой поверхности основного распределителя, наружный слив |
|
|
- Основная ступень. Двухлинейный, двухпозиционный распределитель, одна линия управления совмещена с камерой кольцевой поверхности, другая линия управления сообщена с камерой дифференциальной поверхности, пружинный возврат, срабатывающий от сброса давления управления |
|
|
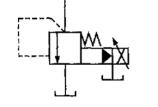
2 Распределитель 3/2 Трехлинейный, двухпозиционный, переход через промежуточную позицию, управление электромагнитом и возвратной пружиной |
|
|
3 Распределитель 5/2 Пятилинейный, двухпозиционный, управление давлением в двух направлениях |
|
|
4 Распределитель 4/3 - с одноступенчатым пилотным управлением. Пилотная ступень. Четырехлинейный, трехпозиционный распределитель, пружинное центрирование, управление двумя противоположными электромагнитами, с мускульным дублированием, наружным сливом |
|
|
Основная ступень Четырехлинейный, трехпозиционный распределитель, пружинное центрирование, внутренний подвод давления управления в двух направлениях; линии управления в нейтральной позиции без давления |
|
|
На упрощенном обозначении пружины центрирования пилота не показаны |
|
|
- с одноступенчатым пилотным управлением. Пилотная ступень. Четырехлинейный, трехпозиционный распределитель, пружинное центрирование, управление одним электромагнитом с двумя противоположными обмотками, с мускульным дублированием, наружным подводом потока управления |
|
|
Основная ступень Четырехлинейный, трехпозиционный распределитель, центрирование давлением и пружинное, срабатывает от сброса давления управления; линии управления в нейтральной позиции под давлением |
|
|
На упрощенном обозначении отдельные треугольники показывают центрирующее давление |
|
|
5 Дросселирующий распределитель |
|
|
- четырехлинейный, две характерные позиции, одна нейтральная позиция, пружинное центрирование, бесконечный ряд промежуточных позиций |
|
|
- с открытым центром все линии в нейтральной позиции сообщены |
|
|
- с закрытым центром все линии в нейтральной позиции закрыты |
|
|
- с серворегулированием, с закрытым центром, пружинным центрированием, электромагнитным управлением |
|
|
6 Клапан обратный: |
|
|
- без пружины; открыт, если давление на входе выше давления на выходе |
|
|
- с пружиной; открыт, если давление на входе выше давления на выходе плюс давление пружины |
|
|
7 Клапан обратный с поджимом рабочей средой, управление рабочей средой позволяет закрывать клапан без возвратной пружины |
|
|
8 Гидрозамок односторонний |
|
|
9 Гидрозамок двухсторонний |
|
|
10 Клапан «ИЛИ» Входная линия, соединенная с более высоким давлением, автоматически соединяется с выходом в то время как другая входная линия закрыта |
|
|
11 Клапан «И» Выходная линия находится под давлением только тогда, когда обе входные линии под давлением |
|
|
12 Клапан быстрого выхлопа Когда входная линия разгружена, выходная свободна для выхлопа |
|
|
13 Пресс-масленка |
|
|
14 Клапан напорный (предохранительный или переливной) |
|
|
- прямого действия |
|
|
- прямого действия - с дистанционным управлением гидравлический |
|
|
- прямого действия - с дистанционным управлением пневматический |
|
|
- непрямого действия - с обеспечением дистанционного управления |
|
|
- прямого действия с электромагнитным управлением |
|
|
- непрямого действия с пропорциональным электромагнитным управлением |
|
|
15 Клапан редукционный: одноступенчатый, нагруженный пружиной |
|
|
- с дистанционным управлением |
|
|
- двухступенчатый, гидравлический, с наружным регулированием возврата |
|
|
- со сбросом давления гидравлический |
|
|
- со сбросом давления пневматический |
|
|
- со сбросом давления, с дистанционным управлением, гидравлический |
|
|
- со сбросом давления, с дистанционным управлением, пневматический |
|
|
16 Клапан разности давлений |
|
|
17 Клапан соотношения давлений |
|
|
18 Клапан последовательности, одноступенчатый, нагруженный пружиной, на выходе может поддерживаться давление, с наружным дренажом |
|
|
19 Клапан разгрузки смазочной системы |
|
|
20 Дроссель регулируемый Без указания метода регулирования или положения запорно-регулирующего элемента, обычно без полностью закрытой позиции |
|
|
21 Дроссель регулируемый Механическое управление роликом, нагружение пружиной |
|
|
22 Вентиль Без указания метода регулирования или положения запорно-регулирующего элемента, но обычно с одной, полностью закрытой позицией |
|
|
23 Дроссель с обратным клапаном С переменным дросселированием, со свободным проходом потока в одном направлении, но дросселированием потока в другом направлении |
|
|
24 Регуляторы расхода |
|
|
Значение расхода на выходе стабилизируется вне зависимости от изменения темпер; |