Сельсины: полное руководство по классификации, параметрам и применению
Классификация сельсинов и основные показатели
Сельсины представляют собой индукционные машины особого типа. Их главная особенность — способность преобразовывать угловое положение ротора в систему напряжений с определённой амплитудой и фазой. Обратный процесс тоже возможен: система входных напряжений превращается в соответствующее угловое положение или напряжение с функцией зависимости от угла поворота.
По функциональному назначению эти устройства делятся на несколько категорий. Существуют сельсины-датчики (СД), дифференциальные датчики (СДД), индикаторные приемники (СПИ), дифференциальные индикаторные приемники (СПДИ) и трансформаторные приемники (СПТ). Каждому типу соответствует своя область применения.
Одноканальные и двухканальные конструкции
Сельсины-датчики вместе с СПТ бывают одноканальными — с двухполюсными обмотками синхронизации, и двухканальными. Последние имеют как двухполюсные обмотки для грубого канала, так и многополюсные для точного. Индикаторные приемники иногда выполняются двойными, когда два СПИ объединены в одном корпусе.
По способу токосъема различают контактные и бесконтактные исполнения. Первые используют щеточно-коллекторный узел, вторые — трансформаторную связь. Выбор зависит от требований к надёжности и сроку службы.
Режимы работы и применение
Эти устройства служат измерителями рассогласования в следящих системах. На их базе строятся дистанционные передачи индикаторного типа (ИДП) и трансформаторного типа (ТДП). Соответственно, выделяют индикаторный и трансформаторный режимы работы.
Практика показывает, что правильный выбор режима влияет на точность всей системы. Индикаторный режим подходит для визуального отображения положения, трансформаторный — для дальнейшей обработки сигнала.
Классы точности и погрешности следования
Точностные показатели — ключевая характеристика сельсина как функционального элемента. Действующая классификация по классам точности представлена в нормативных документах и охватывает широкий диапазон значений.
| Таблица 1. Классы точности сельсинов в трансформаторных дистанционных передачах | |||||||||||
| Класс точности | 0,1 | 0,2 | 0,3 | 0,5 | 1 | 2 | 3 | 5 | 10 | 20 | 30 |
| Погрешность следования СД, СПТ и СДД в ТДП, угл. мин | ±0,1 | ±0,2 | ±0,3 | ±0,5 | ±1 | ±2 | ±3 | ±5 | ±10 | ±20 | ±30 |
Погрешности в индикаторных передачах
Для индикаторных дистанционных передач действуют свои нормы точности. Они менее строгие, чем для трансформаторных систем, что объясняется особенностями применения.
| Таблица 2. Классы точности сельсинов в индикаторных дистанционных передачах | ||||
| Класс точности | 30 | 45 | 60 | 90 |
| Погрешность следования СД, СПИ и СПДИ в ИДП, угл. мин | ±30 | ±45 | ±60 | ±90 |
Заметьте, разница между классами существенная. Выбор зависит от требований конкретной задачи.
Напряжение возбуждения и частота
Для сельсинов установлен стандартный ряд напряжений возбуждения: 127 (110), 40 (36), 27, 12, 6 В. Допуск обычно составляет ±5%. Номинальная частота — 50, 400 или 1000 Гц. Изменение частоты при эксплуатации регламентируется в пределах ±(3—5)%.
Максимальное напряжение синхронизации зависит от напряжения питания. Значения регламентированы нормативной документацией и приведены ниже.
| Таблица 3. Значения максимальных напряжений синхронизации | |||||
| Напряжение питания, В | 127 | 40 | 27 | 12 | 6 |
| Максимальное напряжение синхронизации, В | 127, 58 | 40, 20 | 12 | 6 | 3 |
Индикаторные контактные сельсины серий НД и НС
Сельсины серий НД и НС работают на частоте 50 Гц. Серия НД универсальна — подходит для индикаторного и трансформаторного режима. Серия НС предназначена только для индикаторного режима.
Электрическая схема стандартна для этих типов. Выводные концы обмоток обозначаются: возбуждения — В2, В1; синхронизации — Ф1, Ф2, Ф3. Крепление осуществляется за упорный буртик. Режим работы — продолжительный.
Общие технические данные для 50 Гц
Напряжение возбуждения составляет 110 ± 5,5 В. Частота — 50 ± 1,5 Гц. Асимметрия нулевых положений ротора варьируется от ±15 угл. мин для класса 1 до ±60 для класса 3.
Погрешность следования ИДП тоже зависит от класса: ±45, ±90 и ±150 угл. мин соответственно. Время успокоения ротора сельсина-приемника не превышает 3 секунд.
Частота вращения вала различается по моделям. НД-1414 — 250 об/мин, НД-1511 — 500 об/мин, остальные — 10 об/мин. Максимальная частота вращения вала ограничена 500 об/мин.
Условия эксплуатации
Вибрационные нагрузки допускаются в диапазоне частот до 200 Гц с ускорением 40 м/с². Ударные нагрузки — до 400 м/с². Температурный диапазон зависит от конкретной модели.
НД-1414 работает от -60 до +70 °С. НД-1511 и НД-1501 — от -60 до +85 °С. Остальные типы — от -60 до +50 °С. Относительная влажность воздуха при 40 °С достигает 98%.
Гарантийная наработка составляет 3000 часов для НД-1501, НД-1404, НС-1404. Для НД-1511 и НД-1414 — 5000 часов. Остальных типов — 1500 часов.
Дифференциальные сельсины-приемники НЭД и ЭД
Индикаторные дифференциальные сельсины-приемники серий НЭД и ЭД предназначены для работы в индикаторном режиме. Электрическая схема включает две обмотки синхронизации.
Обозначение выводов первой обмотки: С1, С2, С3 (Р1, Р2, Р3). Второй обмотки: С4, С5, С6 (С1, С2, С3). В скобках указаны старые обозначения. Крепление — за упорный буртик.
Технические характеристики серий НЭД и ЭД
| Таблица 4. Технические данные сельсинов серий НЭД, ЭД | |||||
| Параметр | НЭД-1501 | НЭД-1101 | НЭД-1101Б | НЭД-1101П | ЭД-1204 |
| Напряжение возбуждения, В | 58 | 49 | 150 | 100 | 100 |
| Частота напряжения возбуждения, Гц | 50 | 50 | 50 | 400(500) | 400(500) |
| Максимальный синхронизирующий момент, 10⁻⁴ Нм | 2350 | 294 | 250 | 637 | 216 |
| Удельный синхронизирующий момент, 10⁻⁴ Нм/угл. град | 34 | 6 | 4 | 10 | 4 |
| Момент статического трения, 10⁻⁴ Н·м | 22 | 9 | 9 | 12 | 7 |
Время успокоения и частота вращения
Время успокоения ротора сельсина-приемника варьируется. НЭД-1101Б — 3 секунды. ЭД-1204 — 5 секунд. Остальных типов — 4 секунды.
Частота вращения вала составляет 10 об/мин. Максимальная частота вращения для НЭД-1101П и ЭД-1204 — 500 об/мин. Остальных типов — 300 об/мин.
Погрешность следования индикаторной дистанционной передачи зависит от класса точности: ±45, ±90 и ±150 угл. мин для классов 1, 2 и 3 соответственно.
Трансформаторные дифференциальные сельсины ДИД
Сельсины ДИД работают исключительно в трансформаторном режиме. Электрическая схема аналогична предыдущим типам с двумя обмотками синхронизации.
Обозначение выводов первой обмотки: С1, С2, С3. Второй обмотки: С4, С5, С6 (Р1, Р2, Р3). Крепление — за упорный буртик. Режим работы — продолжительный.
Технические данные серии ДИД
| Таблица 5. Технические данные сельсинов серии ДИД | ||||
| Параметр | ДИД-505ТВ | ДИД-1101 | ДИД-1101П | ДИД-1204 |
| Напряжение возбуждения, В | 58 | 50 | 100 | 100 |
| Частота напряжения возбуждения, Гц | 50 | 50 | 400(500) | 400 |
| Максимальное напряжение синхронизации, В | 70 | 53 | 95 | 98 |
| Потребляемый ток, А | — | 0,15 | 0,13(0,11) | 0,15 |
| Момент статического трения, Н·м | 0,005 | 0,002 | 0,002 | 0,002 |
Сельсины ДФС-32-1В
Эти сельсины тоже предназначены только для трансформаторного режима. Обозначение выводов первой обмотки: 1, 2, 3. Второй обмотки: 10, 11, 12.
Крепление фланцевое с упорным буртиком. К дифференциальному сельсину ДФС-32-1В допускается подключение не более трех приемников типа СБ-32-1ВП, СБ-20-1ВП или С-30ВП.
Напряжение возбуждения — 36 В. Частота — 400 Гц. Максимальное напряжение синхронизации — 25 В. Потребляемый ток — 0,018 А. Масса — 0,17 кг.
Бесконтактные сельсины серий БД и БС
Сельсины серий БД и БС на частоту 50 Гц представляют бесконтактное исполнение. Датчики серии БД работают в индикаторном и трансформаторном режиме.
Сельсины-приемники БС-1405 и БС-1405Б — только в трансформаторном режиме. Остальные приемники серии БС — только в индикаторном режиме.
Точностные показатели серий БД и БС
| Таблица 6. Точностные показатели и показатели сопряжения сельсинов серий БД, БС | |||
| Показатель | Норма для класса | ||
| 1 | 2 | 3 | |
| Асимметрия нулевых положений ротора, угл. мин: БД-1501, БД-1501Б | ±21 | ±30 | ±60 |
| Асимметрия нулевых положений ротора, угл. мин: БС-1405 | ±18 | ±30 | ±60 |
| Погрешность следования индикаторной дистанционной передачи, угл. мин | ±45 | ±90 | ±150 |
| Крутизна на выходе СПТ, В/угл. град | — | 0,88 | 1 |
| Время успокоения ротора, с | — | 3 | — |
Серии БД-500М, БС-500М, ДБС-500М
Эти сельсины работают в индикаторном режиме на частоте 50 Гц. Сельсин ДБС-500М состоит из двух одинаковых приемников в одном корпусе.
Напряжение возбуждения — 127 В. Частота — 50 Гц. Максимальное напряжение синхронизации — 55 В. Потребляемый ток — 0,48 А.
Максимальный синхронизирующий момент приемников БС-500М и ДБС-500М — 0,08 Н·м. Удельный синхронизирующий момент — 17×10⁻⁴ Н·м/угл. град.
Технические параметры и условия эксплуатации
Условия эксплуатации сельсинов различных серий имеют свои особенности. Вибрационные нагрузки, температурные диапазоны и гарантийная наработка различаются в зависимости от типа и частоты работы.
Вибрационные и ударные нагрузки
Для серий НД и НС на 50 Гц диапазон частот вибрации — до 200 Гц, ускорение — 40 м/с². Ударные нагрузки — 400 м/с².
Для серий НД на 400 и 500 Гц диапазон частот вибрации увеличивается до 2000 Гц, ускорение — 100 м/с². Ударные нагрузки остаются на уровне 400 м/с².
Серии БД и БС на 400 Гц выдерживают вибрацию до 2000 Гц с ускорением 150 м/с² для большинства типов. Ударные нагрузки — до 750 м/с².
Температурные режимы
Температура окружающей среды варьируется по моделям. Большинство сельсинов работают от -60 до +85 °С. Некоторые типы ограничены диапазоном -50 до +50 °С или -40 до +50 °С.
Относительная влажность воздуха при температуре 40 °С составляет 98% для всех серий. Это важный параметр при выборе оборудования для влажных помещений.
Гарантийная наработка
Гарантийная наработка сельсинов различается существенно. Минимальное значение — 1500 часов для некоторых типов серий НД и НС.
Максимальное значение достигает 10000 часов для отдельных типов серий БД и БС на частоту 400 Гц. Средние значения находятся в диапазоне 3000-5000 часов.
Ограничения подключения приемников к датчикам
Максимально допустимое количество сельсинов-приемников, подключаемых к одному датчику, зависит от типа датчика и режима работы. Это критически важный параметр при проектировании систем.
| Тип сельсина-датчика | Режим работы | Виды и типы сельсинов-приемников | |||||
| СПИ | СПТ | СПДИ | СДД | ||||
| БС-1404П | БС-151А | БС-155А | ЭД-1204 | НЭД-1101П | ДИД-1101П | ||
| НД-1404П НД-1214 НД-1204 |
Индикаторный Трансформаторный Индикаторный Трансформаторный Индикаторный |
4 | 10 7 4 |
8 4 |
1 1 - 1 1 |
1 1 1 - |
1 1 |
Ограничения для серий БД и БС
Для датчика БД-500М максимально допустимое количество приемников — 2 шт. Для БД-160А: БС-151А — 2 шт., БС-155А — 1 шт.
К одному датчику СС-405ТВ допускается подключать один приемник СС-405ТВ. К одному датчику НД-1404П — один сельсин-приемник ДС-400.
К дифференциальному сельсину ДФС-32-1В — не более трех приемников типа СБ-32-1ВП, СБ-20-1ВП или С-30ВП.
Габаритные размеры и масса оборудования
Габаритные и установочные размеры сельсинов варьируются в широком диапазоне. Масса тоже существенно различается в зависимости от типа и серии.
Размеры серий НД и НС
| Таблица 7. Габаритные и установочные размеры, мм, и масса сельсинов НД и НС | |||||||||
| Тип сельсина | Рис. | Ø30 | Ø35 | d1 | l33 | h | h1 | l21 | Масса, кг |
| НД-1521 | а | 100 | 110 | 5 | 197 | 13,5 | 102,5 | 7 | 5,2 |
| НД-1511 | а | 100 | 110 | 5 | 167 | 13,5 | 102,5 | 7 | 3,7 |
| НД-1414 | а | 62 | 67 | 4 | 149 | 13 | 95,5 | 5 | 1,27 |
| НД-1204 | в | 45 | 50 | 3 | 101,5 | 10 | 54 | 4 | 0,39 |
Размеры бесконтактных серий
Сельсины серий БД и БС на частоту 50 Гц имеют габариты от 45 до 100 мм по диаметру. Масса варьируется от 1,20 до 4,25 кг в зависимости от типа.
Серии на частоту 400 Гц компактнее. Диаметр от 45 до 62 мм. Масса от 0,38 до 1,26 кг. Это важно при проектировании систем с ограниченным пространством.
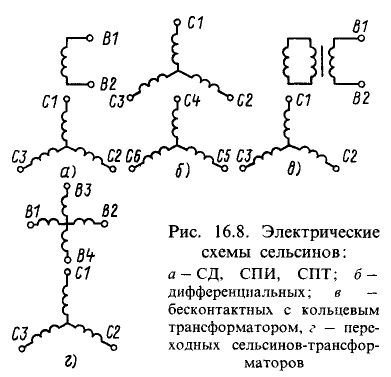
Рис. 1. Электрическая схема сельсинов различных типов
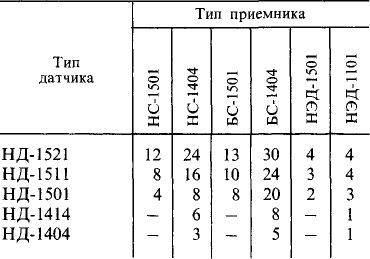
Рис. 2. Габаритные размеры сельсинов серии НД
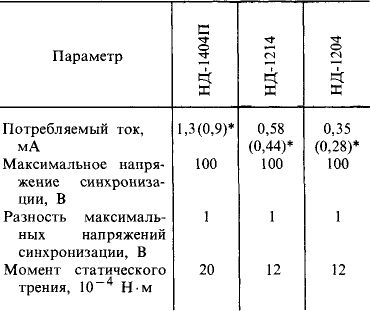
Рис. 3. Установочные размеры сельсинов
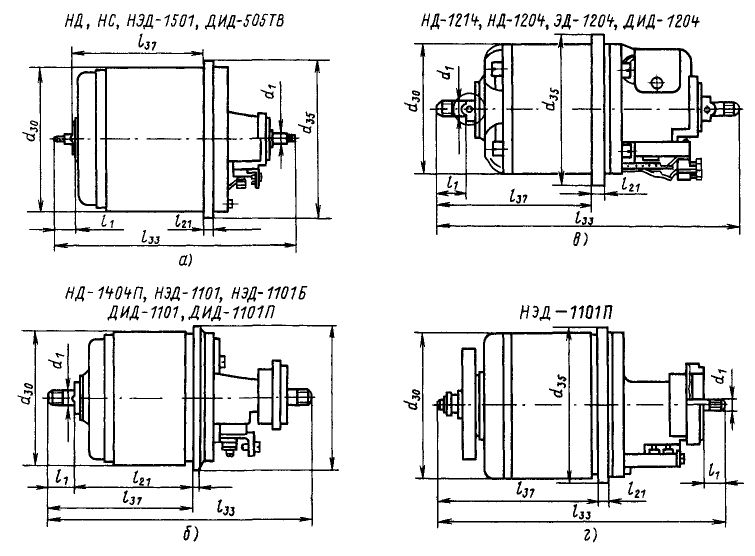
Рис. 4. Габаритные и установочные размеры сельсинов серий НД, НС: а — габарит 100 мм; б — габарит 62 мм; в — габарит 45 мм; г — габарит 62 мм, сельсин-приемник дифференциальный
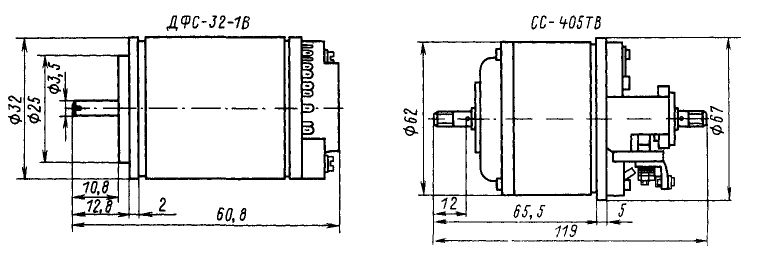
Рис. 5. Габаритные размеры сельсина ДС-400

Рис. 6. Установочные размеры сельсина ДС-400
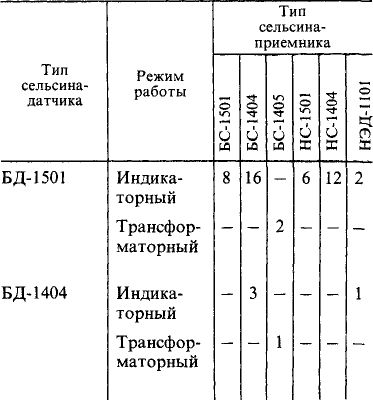
Рис. 7. Схема подключения приемников к датчику
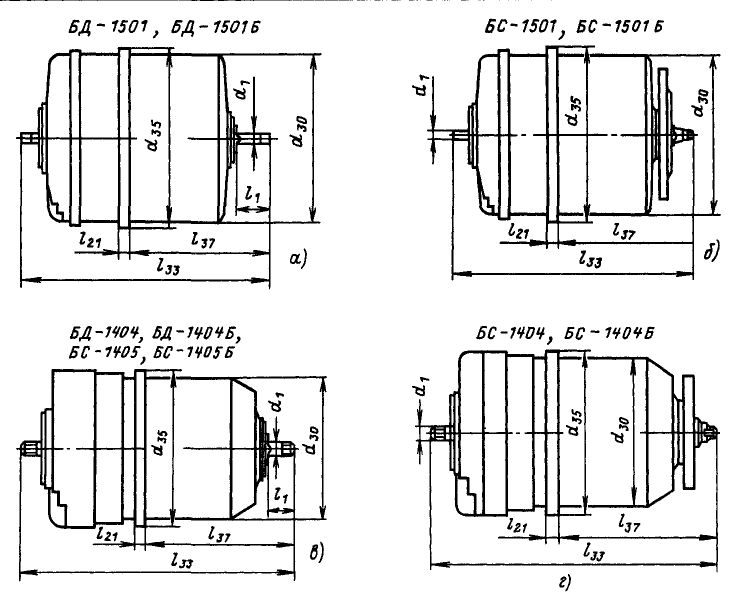
Рис. 8. Габаритные размеры серий БД и БС
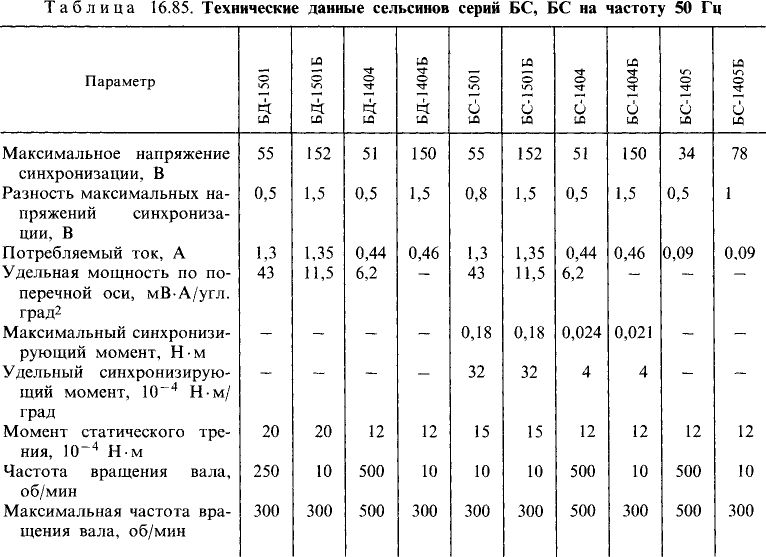
Рис. 9. Установочные размеры серий БД и БС
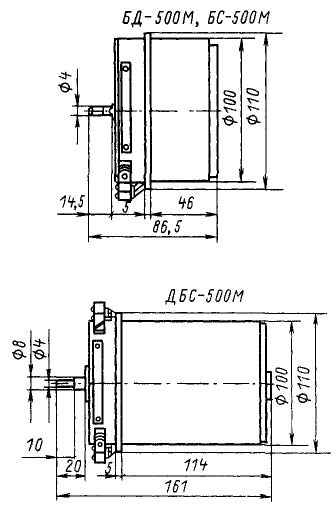
Рис. 10. Габаритные размеры сельсинов на 400 Гц
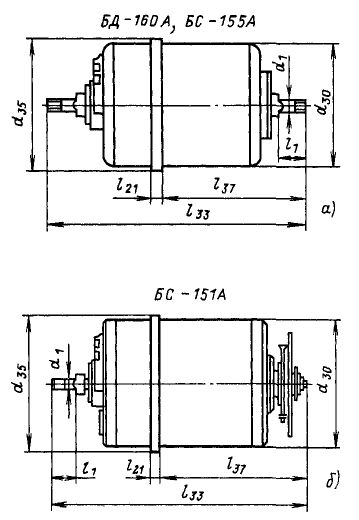
Рис. 11. Размеры сельсинов серии СБ
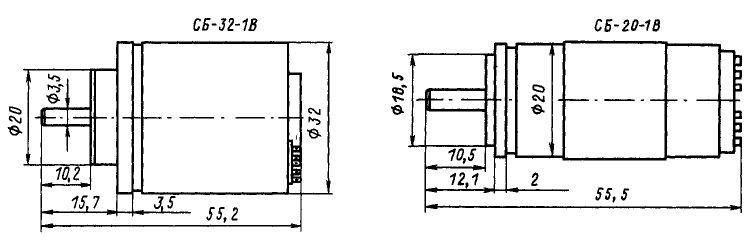
Рис. 12. Габаритные размеры сельсинов СБ-32-1В и СБ-20-1В
Режимы работы: индикаторный и трансформаторный
Различия между индикаторным и трансформаторным режимами работы существенны. Понимание этих различий критически важно для правильного выбора оборудования.
Индикаторный режим
В индикаторном режиме сельсин-приемник непосредственно отображает угловое положение датчика. Ротор приемника поворачивается на угол, соответствующий положению ротора датчика.
Погрешность следования в этом режиме выражается в угловых минутах. За погрешность принимается полусумма абсолютных значений максимальных положительного и отрицательного отклонений.
Измерения проводятся при повороте ротора по часовой и против часовой стрелки. Это позволяет учесть люфты и асимметрию механической части.
Трансформаторный режим
В трансформаторном режиме сельсин-приемник работает как трансформатор. Выходное напряжение является функцией угла рассогласования между роторами датчика и приемника.
Крутизна выходного напряжения — приращение выходного напряжения на обмотке управления при изменении угла рассогласования на 1°. Номинальные значения: 0,05; 0,1; 0,2; 0,3; 0,6 и 1,2 В/угл. град.
Остаточная ЭДС в нулевых точках — минимальное значение ЭДС, которое образуется во вторичных обмотках под действием эллиптического вращающегося магнитного поля.
Как выбрать сельсин для вашей системы
Выбор сельсина зависит от множества факторов. Частота работы, требуемая точность, условия эксплуатации — всё это влияет на окончательное решение.
Критерии выбора
- ✓ Определите требуемую частоту работы: 50, 400 или 500 Гц
- ✓ Выберите режим работы: индикаторный или трансформаторный
- ✓ Уточните класс точности исходя из допустимой погрешности
- ✓ Проверьте соответствие температурному диапазону эксплуатации
- ✓ Рассчитайте количество приемников на один датчик
- ✓ Оцените требования к вибрационной и ударной стойкости
Рекомендации по применению
Для систем с высокими требованиями к точности выбирайте сельсины классов 0,1-0,5. Для индикаторных систем достаточно классов 30-90.
Бесконтактные серии предпочтительнее для применений с длительным сроком службы. Отсутствие щеточно-коллекторного узла увеличивает надёжность.
При работе в экстремальных температурных условиях обращайте внимание на конкретные ограничения каждой модели. Некоторые типы работают до +100 °С, другие ограничены +50 °С.
Гарантийная наработка — важный экономический показатель. Модели с наработкой 5000-10000 часов снижают затраты на обслуживание системы.
Вот и всё, что нужно знать о сельсинах для грамотного выбора оборудования. Остались вопросы? Изучите технические таблицы выше — там вся необходимая информация.

