Что такое вентильный двигатель: конструкция и принцип
Современный вентильный привод объединяет электрическую, механическую и электронную подсистемы в единое цельное мехатронное устройство. В рамках такого подхода удается значительно сократить габариты, избавиться от лишних преобразователей и промежуточных элементов, а значит, повысить надежность всего привода в целом.
В рамках данной статьи рассматривается принцип работы и устройство современных вентильных машин, описываются принципы управления вентильным преобразователем для коммутации с применением датчиков положения ротора, а также перечисляются особенности интегрированного исполнения вентильных двигателей.
Под вентильным двигателем понимают синхронный двигатель, содержащий многофазную обмотку статора, ротор с постоянными магнитами и встроенным датчиком положения. Коммутация такого двигателя осуществляется при помощи вентильного преобразователя. Поэтому его принято называть «вентильным».
По сути, вентильный двигатель с точки зрения метода коммутации представляет собой «инвертированный» вариант коллекторной машины постоянного тока. В вентильном двигателе индуктор находится на роторе, якорная обмотка на статоре. Коммутация осуществляется путем подачи управляющего согласованного воздействия на обмотки статора в зависимости от положения ротора, определяемого с помощью интегрированных в двигатель датчиков обратной связи.
Структура двигателя: от магнитов до датчиков Холла
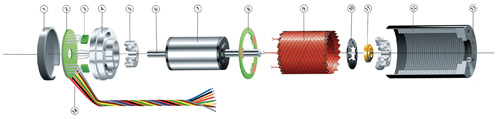
Рис. 1. Структура вентильного двигателя: 1 – задняя крышка, 2 – печатная плата датчиков, 3 – датчики Холла, 4 – втулка подшипника, 5 – подшипник, 6 – вал, 7 – магниты ротора, 8 – изолирующее кольцо, 9 – обмотка, 10 – тарельчатая пружина, 11 – промежуточная втулка, 12 – изоляция, 13 – корпус, 14 – провода.
Рассмотрим структуру вентильного двигателя на примере семейства двигателей Faulhaber (рис. 1). В данном случае в основе ротора лежит двухполюсный магнит, статора трехфазная обмотка, положение ротора определяется с помощью интегрированных в двигатель датчиков Холла. В общем случае ротор может содержать другое количество пар полюсов, а статор иметь более традиционную конструкцию, внешне сходную со статором асинхронной машины.
Обмотки статора: звезда против треугольника
Наиболее распространен статор с тремя обмотками, соединенными «звездой» (реже в «треугольник») без вывода средней точки. Как известно, именно трехфазная структура является наиболее эффективной при минимуме числа обмоток.
При соединении обмоток «звездой» вентильный двигатель имеет большие постоянные момента и меньшие постоянные противо-ЭДС (при соотношении √3) по сравнению с соединением «треугольником». Поэтому соединение «звездой» используется для управления осями, требующими больших моментов, а соединение «треугольником» – для больших скоростей.
В большинстве случаев обмотки статора выполняются без насыщения, т.е. противо-ЭДС обмоток имеет синусоидальную форму. Такие двигатели зачастую называют AC brushless motor в отличие от DC brushless motor, обмотки статора которого выполняются с насыщением. Такое насыщение в DC brushless motor предназначено для снижения пульсаций тока (и соответственно момента) при применении трапецеидальной коммутации.
Но иногда термин DC brushless motor используют для двигателей с питанием через инвертор от сети постоянного тока, что не совсем корректно.
Ротор с постоянными магнитами: момент инерции
Обычно количество пар полюсов, определяемое количеством пар магнитов ротора и определяющее соотношение механического и электрического оборотов, равно 4…8.
Статор может быть выполнен с железным (iron core) или безжелезным (ironless) сердечником. Конструкция статора с безжелезным сердечником обеспечивает отсутствие силы притяжения магнитов ротора и железа статорной обмотки (magnetic attraction) и зубцового эффекта (cogging), но снижает незначительно (на 10…20%) эффективность двигателя из-за меньших значений постоянной момента.
Одно из самых очевидных преимуществ ротора с постоянными магнитами состоит в уменьшении диаметра ротора и, как следствие, в уменьшении момента инерции ротора. Технологически магниты могут быть встроены в ротор или расположены на его поверхности. Но пониженный момент инерции зачастую приводит к малым значениям соотношения момента инерции двигателя и приведенного к его валу момента инерции нагрузки (mismatch ratio), усложняющему настройку привода. Поэтому ряд производителей предлагает наряду со стандартным и повышенный – в 2…4 раза – момент инерции ротора.
Датчики положения: Холла, энкодеры, резольверы
В качестве датчика положения, необходимого для коммутации вентильного двигателя, могут быть использованы датчики Холла (цифровые или аналоговые), энкодер (цифровой, аналоговый или абсолютный) или резольвер.
Цифровые датчики Холла используются для наиболее распространенной – трапецеидальной коммутации вентильного двигателя. Цифровые датчики Холла могут быть выполнены также и на оптической шкале энкодера.
Аналоговые датчики Холла используются для синусоидальной коммутации вентильного двигателя.
Энкодер имеет три дифференциальных канала – два канала А, В прямоугольных импульсов, сдвинутых на 90 электрических градусов, и нулевой импульс I (индекс). Резольвер представляет собой вращающийся трансформатор с обмоткой возбуждения и двумя выходными обмотками со сдвигом 90 электрических градусов.
Аналоговый энкодер имеет аналоговые sin/cos (1В между пиками peak-to-peak) дифференциальные выходы. Внешний интерполятор позволяет повысить исходное разрешение с коэффициентом умножения до 4096.
Абсолютный энкодер передает информацию по положению по синхронному последовательному интерфейсу (SSI или BiSS), протокол которого задается производителем энкодера. Одними из наиболее популярных протоколов являются Heidenhain EnDat, Tamagawa Smart Abs и Stegman Hiperface протоколы.
Дополнительные устройства: тормоза и термозащита
Кроме датчика положения дополнительно могут быть встроены: тахогенератор, термодатчик, тормоз или редуктор.
Тахогенератор применяется в случае использования вентильного двигателя в режиме регулирования/стабилизации скорости с высокой точностью.
Термодатчик для защиты обмоток от перегрева представляет собой несколько последовательно соединенных позисторов, т.е. терморезисторов с положительным температурным коэффициентом (positive temperature coefficient PTC).
Способы коммутации: три технологии управления
Способы коммутации вентильного двигателя различаются по типу датчика положения ротора и особенностям регулирования тока в фазах обмоток статора.
Трапецеидальная коммутация: 6 шагов
Трапецеидальная или шестишаговая (six-step) коммутация вентильного двигателя осуществляется по цифровым датчикам Холла. Для 3-х датчиков Холла, являющихся «грубым» датчиком положения ротора, возможных состояний на полный электрический оборот будет шесть, каждое из которых соответствует 60 электрическим градусам.
При каждом постоянном состоянии датчиков Холла подключаются только две обмотки двигателя, а третья отключена от источника напряжения. Постоянство вектора тока в пределах ±30 электрических градусов от оптимального (создающего максимальный момент) приводит к 17% пульсациям тока.
Преимущества:
- готовность к работе при включении питания|
- дешевый усилитель тока|
- управление током (моментом) аналоговым сигналом ±10В.
Недостатки:
- пульсации тока|
- средние показатели быстродействия при позиционировании и равномерности при сканировании.
Область применения: регулирование скорости при невысоких требованиях к эффективности и равномерности перемещения на низких скоростях.
Синусоидальная коммутация: плавность хода
Синусоидальная коммутация лишена недостатков трапецеидальной коммутации за счет непрерывной и плавной коммутации вектора тока. Это достигается благодаря более высокому разрешению датчика положения ротора (обычно инкрементального энкодера) по сравнению с цифровыми датчиками Холла, имеющими разрешение только 60 электрических градусов.
Для стандартного двигателя с соединением фаз в «звезду» достаточно контролировать ток в двух обмотках с помощью двух регуляторов на базе ПИ-регуляторов. Такой способ коммутации очень эффективен на малых и средних скоростях, но имеет ошибки на высоких скоростях. В этом случае из-за ограниченного усиления ПИ-регулятора при заданном напряжении постоянного напряжения (DC bus) мах скорость ограничена. Несколько повысить скорость позволяет метод сдвига фазы (phase advance).
Преимущества:
- минимальные пульсации тока|
- высокие показатели быстродействия при позиционировании и равномерности при сканировании.
Недостатки:
- ограничение мах скорости при заданном напряжении постоянного напряжения|
- управление током (моментом/силой) при помощи двух аналоговых сигналов ±10В.
Область применения: прецизионные механизмы.
Векторный контроль DQ: максимальная эффективность
Непосредственно векторный контроль тока в координатах DQ использует преобразования между статическими DQ и вращающими UVW координатами вектора тока, известными как преобразования Парка-Кларка. В отличие от синусоидальной такой способ коммутации предполагает работу ПИ-регулятора с напряжениями постоянного тока, а не синусоидальными напряжениями. Это и обеспечивает качество управления током, независимое от скорости вращения двигателя.
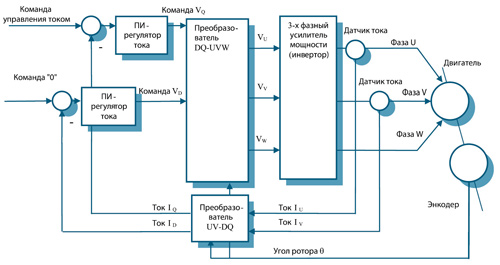
Рис. 2 Векторный контроль тока вентильного двигателя
Векторный контроль предполагает регулирование квадратичной (D) и прямой (Q) составляющих тока. Т.к. только прямая (Q) составляющая тока, перпендикулярная к полю ротора, создает момент двигателя, то задание тока подается на вход прямой (Q) составляющей тока. На вход квадратичной (D) составляющей тока подается «0» сигнал.
Преобразования между статическими DQ и вращающими UVW координатами вектора тока производятся с учетом токов фаз и положения ротора.
Векторный контроль при наличии преимуществ синусоидальной коммутации позволяет расширить диапазон скоростей вентильного двигателя за счет более полного использования напряжения постоянного тока.
Следует отметить, что для синусоидальной или векторной коммутации тока при использовании инкрементального (относительного) датчика положения ротора необходимо первоначально (т.е. при каждом включении питания) сфазировать положение ротора относительно фаз статора. Алгоритм такой начальной фазировки обычно является «встроенным».
Трапецеидальная коммутация вентильного двигателя не требует начальной фазировки благодаря использованию датчиков Холла, являющихся абсолютными датчиками положения ротора. Поэтому их иногда применяют вместе с инкрементальным датчиком положения для реализации синусоидальной или векторной коммутации тока без необходимости производить начальную фазировку. Такая конфигурация рекомендуется для механизмов, где реализация процедуры начальной фазировки затруднена, например, механизмов вертикального перемещения.
Интегрированное исполнение: привод в одном корпусе
Одной из основных перспективных тенденций в развитии современных вентильных двигателей является тяготение производителя к интеграции в единый корпус с двигателем управляющей электроники. Такое решение позволяет предлагать не разрозненный набор комплектующих приводной системы, а законченный привод в сборе. Таким образом решаются возможные проблемы совместимости различных компонент привода, а также проблема различных интерфейсов компонент приводной системы.
Примером интегрированного привода является серия двигателей BG, предлагаемая компанией Dunkermotoren (рис. 3).
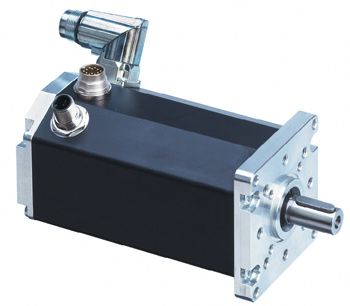
Рис. 3 Двигатели Dunkermotoren серии BG
В рамках данной серии двигателей производитель предоставляет возможность заказать одну и ту же модель в различных исполнениях:
- без интегрированной управляющей электроники,
- с интегрированной коммутирующей электроникой (2-wire),
- с интегрированным контроллером скорости,
- с интегрированным контроллером движения,
- с интегрированным контроллером движения с сетевыми интерфейсами (CAN, PROFINET).
Преимущества вентильных двигателей: таблица сравнения
При разработке нового изделия разработчик часто сталкивается с проблемой выбора двигателя для решения конкретной задачи движения. Когда речь идет о построении привода средней либо малой мощности, как правило, выбор сводится к сборкам на базе коллекторных, вентильных, а также шаговых двигателей.
К несомненным достоинствам вентильных двигателей следует отнести:
| Характеристика | Вентильный двигатель | Коллекторный двигатель | Шаговый двигатель |
|---|---|---|---|
| Запасаемый момент | Высокий | Средний | Низкий |
| Диапазон скоростей | Широкий | Ограничен щетками | Низкий |
| Равномерность движения | Высокая | Средняя | Ступенчатая |
| Точность позиционирования | Высокая (с энкодером) | Низкая | Средняя |
| Надежность | Высокая (нет щеток) | Низкая (износ щеток) | Высокая |
| Стоимость | Средняя/высокая | Низкая | Низкая/средняя |
| Обслуживание | Минимальное | Регулярная замена щеток | Минимальное |
Высокий запасаемый момент:
- Идеальное решение при высоких пиковых нагрузках
- Хорошее ускорение при изменяющихся нагрузках
Высокий диапазон скоростей
Высокую равномерность движения
Высокую точность позиционирования благодаря возможности использования энкодеров и других датчиков обратной связи по скорости/положению.
Области применения: от вакуума до погружных систем
Двигатели для специальных применений:
- в среде высокого вакуума – для полупроводникового производства и научных исследований|
- автоклавируемые – для медицинской и фармацевтической промышленности|
- погружные с высоким классом IP защиты – для работы в жидкостях и агрессивных средах.
Выбор конкретной конфигурации вентильного двигателя зависит от требований к точности, скорости, моменту и условиям эксплуатации. Интегрированные решения с контроллерами движения и сетевыми интерфейсами становятся стандартом для современных автоматизированных систем.
М. Сонных, Л. Ганнель
ООО «Микропривод»
sonnykh@microprivod.ru

