Как повысить производительность прецизионных станков
Современные станки с многокоординатными электроприводами работают на пределе возможностей. Особенно когда речь идет о прецизионном оборудовании. Требования к системам управления растут с каждым годом — нужно больше скорости, выше точность, лучше качество обработки.
Традиционные программируемые логические контроллеры (ПЛК) уже не справляются. Они хороши для простой логики, но когда нужны сложные траектории, синхронизация десятков осей, микронная точность — требуются специализированные решения.
На сцену выходят многоосевые контроллеры управления движением (motion controller). Эти устройства заточены именно под задачи управления приводами. Функционал шире, качество выше, настройка гибче. И главное — они позволяют замкнуть контуры положения и скорости непосредственно в контроллере, а не распылять задачи между разными устройствами.
Базовые принципы работы сетевых протоколов
Понятие «сетевая шина» (fieldbus) включает два компонента: аппаратную часть и программный протокол. Разберемся с каждым.
Физический уровень и топологии сетей
Аппаратная сетевая шина — это физический канал связи. Чаще всего используется двухпроводная дифференциальная медная пара с терминаторами 120 Ом на концах линии. Сегодня практически все сети перешли на кабели CAT5, постепенно переходят на CAT6 и CAT7. Разъемы — стандартные RJ45, а для защиты IP67 применяют M12.
Некоторые шины, например PROFIBUS-DP, поддерживают оптоволоконные кабели. Пластиковые волокна работают до 80 метров, стеклянные — до 3 километров. Это удобно для подключения удаленных станций (nodes). Когда сеть смешанная (электрическая и оптическая части), используют оптические модули связи.
Топологии бывают разные:
- Шина или линия (Bus/Line)
- Дерево (Tree)
- Кольцо (Ring)
- Звезда (Star)
- Гирлянда (Chain)
Программная часть — это объекты сетевого протокола. В архитектуре Master/Slave система верхнего уровня (Master) задает режимы и параметры станциям нижнего уровня (Slave). Библиотека объектов стандартизирована для каждого протокола. Каждый объект адресуется 16-битным индексом.
Данные передаются пакетами. Пакет содержит ID станции, бит контроля и 0–8 бит данных. Среди распространенных полевых шин автоматизации (field bus) выделим CANopen, EtherCAT, PROFIBUS, Ethernet TCP/IP, Modbus, DeviceNet.
CANopen: универсальное решение для автоматизации
CANopen — пожалуй, самая популярная шина для задач автоматизации. Простота реализации, развитая номенклатура периферийных станций — вот её сильные стороны. Организация CANinAutomation (CiA) разработала ряд профилей для унификации оборудования разных производителей.
Профиль DSP 402 для управления движением
Для систем управления движением ключевым стал профиль DSP 402 «Profile for Drives and Motion Control». Он определяет инструкции, с помощью которых Master задает режимы работы:
- Профилированное и непрофилированное управление по положению и скорости
- Профилированное управление по току (моменту/силе)
- Позиционная интерполяция
- Выход в нулевую координату (homing)
Для профилированных режимов задаются параметры профиля движения: ускорение, замедление, рывок.
Производители часто расширяют стандартный список. Например, многоосевой сетевой контроллер Maestro от Elmo для профилированного режима управления по положению позволяет дополнительно определить заданную позицию, механические и программные ограничения, максимальные значения скорости, ускорения и замедления.
| Профиль | Назначение | Пример применения |
|---|---|---|
| DS301/DSP302 | Базовая спецификация | Общие функции CANopen |
| DS401 | Устройства ввода/вывода | Датчики, исполнительные механизмы |
| DS405 | IEC 61131-3 программируемые устройства | Логические контроллеры |
| DSP 402 | Приводы и управление движением | Сервоприводы, шаговые двигатели |
Ethernet реального времени: скорость и синхронизация
Стандартный Ethernet на базе операционной системы ПК не обеспечивает нужной синхронизации станций. Поэтому разработали более 20 сетевых шин «реального времени» на базе Ethernet (Real-Time Ethernet, RTE).
Что значит «реальное время»? Это детерминированный цикл (deterministic cycle) — система реагирует на внешнее событие за строго определенное время. Важны не только длительность цикла, но и стабильность (Jitter), и задержка между станциями (Skew).
Шины реального времени используют аппаратную базу Ethernet, но применяют упрощенный протокол для передачи команд. Скорость передачи повышена — для быстрого 100BaseTX Ethernet до 100 Mbps. Результат — сокращенное время цикла передачи данных. Это критично при передаче профиля движения и замыкании контуров положения/скорости.
Такие шины часто называют шинами управления движением (motion bus). К ним относятся:
- SERCOS III
- Ethernet PowerLink
- MechatroLink III
- ProfiNET
- SynqNet
- EtherCAT
Сравнение характеристик наиболее распространенных шин motion:
| Протокол | Скорость | Топология | Время цикла |
|---|---|---|---|
| EtherCAT | 100 Mbps | Line, Ring | 100 мкс |
| Ethernet PowerLink | 100 Mbps | Star, Line | 200 мкс |
| SERCOS III | 100 Mbps | Line, Ring | 50 мкс |
| ProfiNET IRT | 100 Mbps | Line, Star | 250 мкс |
| MechatroLink III | 100 Mbps | Line | 100 мкс |
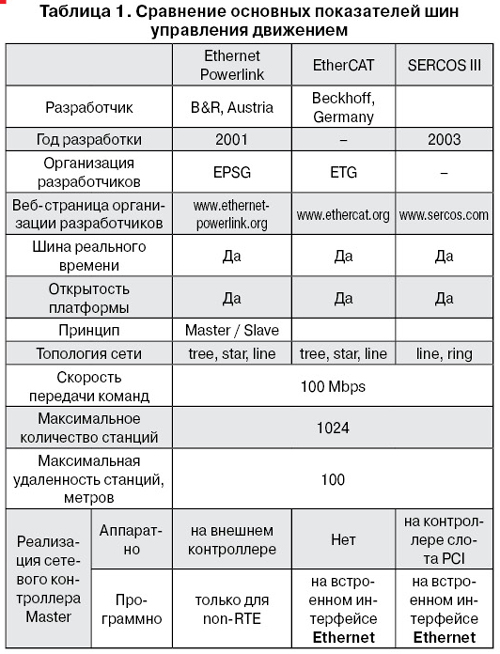
Рис. 1. Сравнительная таблица характеристик шин управления движением
Централизованные и децентрализованные архитектуры
В зависимости от того, где реализуются основные задачи управления движением (задание профиля и замыкание контуров положения/скорости), системы делятся на два типа.
В централизованной структуре (структура I) эти задачи выполняет непосредственно программируемый контроллер автоматизации (ПКА). В децентрализованной (структура II) — «умный» (smart) контроллер на уровне привода.
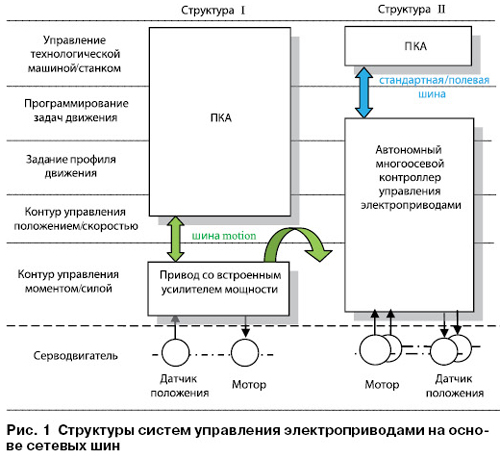
Рис. 2. Централизованная структура управления с топологией «гирлянда» (механическая связь двигателя с датчиком положения показана штрихпунктирной линией)
Централизованная структура I обладает более высокой гибкостью для координации и синхронизации осей. Шина данных передает не только управляющие сигналы для быстродействующего контура тока, но и текущую информацию с датчиков положения.
Есть нюанс. Необходимость обеспечения времени сервоцикла не выше 1 мс приводит к большей загрузке шины данных. Это ограничивает количество управляемых осей. Впрочем, ПКА в структуре I может реализовывать сложные задачи управления с различным приоритетом, что позволяет сократить время сервоцикла для осей, требующих повышенного быстродействия.
Комбинированные системы для сложных задач
Рассмотренные структуры имеют ограничения для механизмов, требующих сверхвысокой степени координации и синхронизации. Например:
- Прецизионные двухосевые мостовые механизмы (gantry)
- Скоростной обход сложных пространственных контуров
- Многокоординатные инспекционные и контрольно-измерительные машины
В таких случаях предпочтительна комбинированная структура. Оси с высокими требованиями к синхронизации управляются централизованно, а остальные — через локальную децентрализованную систему на базе полевых шин автоматизации.
Для подключения осей по централизованному принципу используют как аналоговый сигнал ±10В, так и цифровые шины. Именно здесь предпочтительны шины управления движением, т.к. управляемый контур тока имеет высокое быстродействие (более 1 кГц).
Контроллеры такого типа предлагают:
- Baldor (NextMove ESB2) и ACS (SPiiPlus 3UHP) с полевой шиной CANopen
- Galil (DMC40x0) с полевой шиной Ethernet TCP/IP
- Yaskawa (серия MP2000) с полевой шиной Mechatrolink-II

Рис. 3. Комбинированная двухуровневая структура системы управления
Интересное решение предлагают одноосевые интеллектуальные сервоконтроллеры MintDrive от Baldor. Благодаря встроенной возможности CANopen Master они позволяют добавить еще один уровень иерархии в локальной децентрализованной системе.
Инструменты разработки и настройки
Для удобства разработки системы управления станком предназначен графический интерфейс пользователя на базе ПК. Основные средства такого интерфейса позволяют пройти все стадии проекта при использовании ПКА:
- Конфигурирование интерфейса с ПК
- Конфигурирование компонентов системы
- Ручная и автоматизированная настройка замкнутых контуров электропривода
- Разработка и редактирование программ пользователя
- Сбор и обработка данных, включая многоканальный осциллограф с опцией построения 2D-графиков
- Диагностика состояния, включая выдачу сообщений о неисправности в режиме прерывания (Interrupt)
Современные инструменты разработки существенно сокращают время запуска оборудования. Автоматическая настройка контуров, визуализация процессов, встроенная диагностика — всё это работает на результат.
Сравнение производителей и выбор оптимального решения
Контроллеры управления многокоординатными электроприводами выпускают как специализированные производители сервоусилителей и контроллеров, так и производители ПЛК и комплектного электротехнического оборудования.
Специализированные производители:
- Galil
- Delta Tau
- ACS
- Control Techniques
- Aerotech
- Elmo
- Copley
- MEI
- Trio
- MegaF
Производители ПЛК и комплектного оборудования:
- Siemens
- GE Fanuc
- Danaher
- Baldor
- Parker
- Omron
- Schneider Electric
| Протокол | Производители (поддерживающие протокол) |
|---|---|
| Ethernet PowerLink | ABB, AMC, Baldor, B&R, Danaher Motion, Parker Hannifin, Schneider Electric, Weidmuller, SEW Eurodrive, Wago, KEB, Lenze, Kuka Roboter |
| EtherCAT | STMicroelectronics, Baldor, Beckhoff, Balluff, Delta Tau, Elmo, Faulhaber, Fagor, Festo, Galil, Jetter, Keyence, Maxon, National Instruments, Panasonic, Parker Hannifin, Philips Applied Technologies, Schneider Electric, SICK, Bosch Rexroth, Control Techniques, Copley Controls, Mitsubishi, INFRANOR Electronics, Omron, Trio Motion Technology, Yaskawa Eshed Technology (YET), Turck, SEW Eurodrive, Wago, Kuka Roboter, Lenze, KEB |
| SERCOS III | Rockwell Automation, Bosch Rexroth, Allen-Bradley, Beckhoff, Danaher Motion |
Обратите внимание: многие фирмы поддерживают несколько протоколов одновременно. Это дает гибкость при выборе архитектуры системы.
Выбор конкретного решения зависит от задач. Для простых систем с небольшим количеством осей подойдет CANopen. Для высокоскоростных прецизионных станков с жесткими требованиями к синхронизации — EtherCAT или SERCOS III. Для сложных многоуровневых систем — комбинированная архитектура.
Наличие удобного и мощного интерфейса пользователя позволяет установить, запрограммировать и настроить многокоординатную систему управления в максимально сжатые сроки. Это уже не просто требование — это необходимость в условиях современного производства.
к.т.н. Л. Ганнель, Э. Кигель
Positech LTD,
leonid.gannel@gmail.com
Литература:
1. Ганнель Л.В., Особенности специализированных контроллеров для управления прецизионными электроприводами. Промышленные АСУ и контроллеры, Изд-во «Научтехлитиздат», №1, 2009. стр.35-39.
2. Ганнель Л.В., Тенденции развития систем управления многоосевыми прецизионными электроприводами. – РИТМ, №10, 2009. стр.46-48.

