Радиально-поршневые насосы RKP: цифровое управление
Производство радиально-поршневых насосов RKP сравнительно недавно было приобретено у фирмы Bosch.
Модернизированный вариант RKP-D со встроенной цифровой электроникой на основе интеллектуального дросселирующего гидрораспределителя имеет исполнения с рабочими объемами:
| Параметр | Значение | Характеристика |
|---|---|---|
| Рабочий объем V₀ | 19; 32; 45; 63; 80; 100; 140 см³ | 7 типоразмеров |
| Диапазон давлений | до 35 МПа | 28 МПа для V₀ = 45; 100; 140 см³ |
| Количество поршней | 9 | Оптимизированная геометрия |
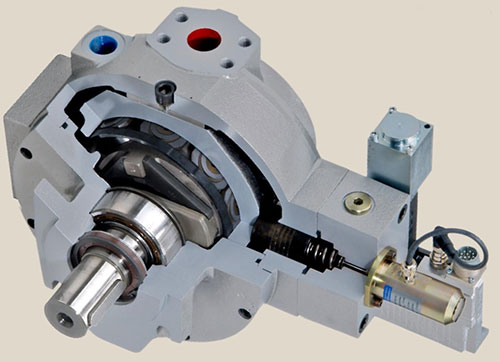
Рис. 1. Радиально-поршневой насос RKP-D
Конструктивные особенности
Использование «скользящего» статора позволило существенно увеличить срок службы насоса, а оптимизация геометрии каналов и расположения 9-ти поршней — снизить шум.
Рабочие жидкости:
- ✓ Минеральные масла
- ✓ Эмульсии HFC и HFD
- ✓ Другие рабочие жидкости
Тандемные связки
Насосы могут иметь тандемные связки из нескольких машин с монтажными поверхностями:
- SAE-A
- SAE-B
- SAE-C
Электронное управление
Наличие датчиков:
- ✦ Эксцентриситета статора (расхода Q)
- ✦ Давления (p)
позволяет встроенной системе электронного управления выполнять функции:
- Регуляторов давления
- Регуляторов подачи
- Регуляторов мощности
Преимущества:
- ★ Высокая гибкость управления
- ★ Удобный пользовательский интерфейс
- ★ Дистанционное управление на основе интернет-технологий
- ★ Аналоговое управление от стандартных промышленных сетей
- ★ Plug&Play-принцип — замена насоса без специальной настройки ПО
Гидроаппаратура: сервозолотники D636-D675
Новейшей разработкой является обширная гамма сервозолотников (в российской терминологии — дросселирующих гидрораспределителей — ДГР) со встроенными цифровой электроникой и интерфейсом.
Аппараты D636/D638 прямого управления
Типичные представители — аппараты D636/D638 прямого управления, оснащенные линейными силовыми двигателями.
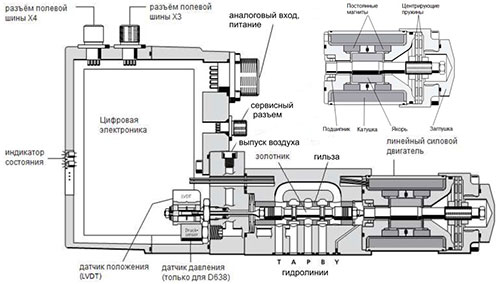
Рис. 2. Сервозолотник D636/D638
Режимы управления
Наличие встроенных датчиков перемещения золотника и давления (только для D638) дает возможность:
| Режим | Принцип | Характеристики |
|---|---|---|
| Управление расходом | Положение золотника (LVDT) пропорционально сигналу управления | Корректировка линейности, формы сигнала, зоны нечувствительности, амплитуды |
| Управление давлением | Информация от датчика в линии А | Корректировка параметров контура (линейность, форма сигнала, PID-регулирование) |
| p/Q-регулирование | Управление перемещением до превышения установленного давления | Переход в режим управления давлением |
Интерфейс и параметры
Встроенный интерфейс на базе полевых шин:
- CANopen
- Profibus DP V1
- EtherCAT
А также по два аналоговых входа и выхода, причем параметры регулирования можно изменять в режиме on-line.
В аварийной ситуации или при остановке рабочего органа плоская пружина линейного двигателя возвращает золотник в безопасную позицию.
Характеристики D636/D638
| Параметр | Значение |
|---|---|
| Условный проход Dу | 6 мм |
| Масса | 2,5 кг |
| Номинальные расходы Qном | 5; 10; 20; 40 л/мин (при Δp = 7 МПа) |
| 75 л/мин | |
| Перекрытие золотника | Нулевое или положительное (3% или 10%) |
| Рабочее давление | 35 МПа (≥5 МПа в линии Т без внешнего дренажа) |
| Гистерезис | ≤0,05% |
| Частота при 90° сдвиге фазы | 70 Гц (90% от полного входного сигнала) |
| Температура окружающей среды | от –20 до +60 °С |
| Степень защиты | IP65 |
| Класс чистоты РЖ по ISO 4406 | 18/15/12 |
D637 и многокаскадные ДГР
ДГР прямого управления типа D637 с Dу = 10 мм:
| Параметр | Значение |
|---|---|
| Номинальные расходы | 60 или 100 л/мин |
| Qmax | 180 л/мин |
| Масса | 7,9 кг |
| Время перестановки на полный ход | 14 мс |
Аналогичные принципы регулирования заложены в многокаскадных ДГР, в которых в качестве задающих устройств применяется:
- Аппарат прямого действия с линейным двигателем
- Управляющая ступень «струйная трубка» (малочувствительна к засорению)
Многокаскадные ДГР D671-D675
Для модификаций:
- D671 (Qном = 180 л/мин)
- D672 (Qном = 240 л/мин)
предусмотрена возможность получения индивидуальных расходных характеристик по заказу путем соответствующего профилирования дросселирующих прорезей в гильзе.
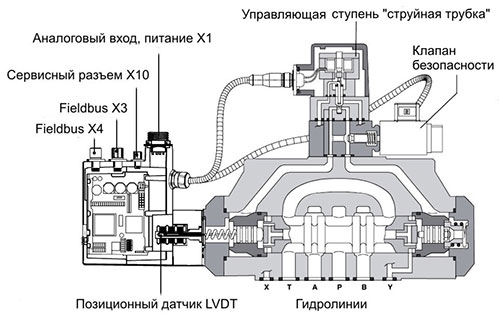
Рис. 3. Многокаскадные ДГР D671-D675
Гамма D671-D675
| Параметр | Значение |
|---|---|
| Тип | Двух- и трехкаскадные ДГР |
| Условный проход Dу | 10…50 мм |
| Номинальные расходы | 80…1500 л/мин (Δp = 7 МПа) |
Интересная особенность — наличие клапана безопасности, который при отключении электромагнита объединяет торцовые камеры основного золотника, позволяя пружинам устанавливать его в нейтральную (безопасную) позицию.
Сервис и диагностика
Специальный сервисный разъем позволяет подключать ДГР к ПК или ноутбуку с целью:
- ✦ Изменения параметров
- ✦ Диагностики
- ✦ Возможного устранения отказов
С помощью встроенного архиватора можно:
- ✦ Просматривать и анализировать данные об изменении параметров в процессе длительной работы
- ✦ Сохранять их или копировать
Контроллер и ПО
«Гидравлические» фирмы поставляют оригинальную комплектующую электронику и специальное программное обеспечение, адаптированное под специфику гидроприводов, а также предлагают услуги по поставке своих изделий «под ключ».
В качестве примера показан цифровой контроллер MSC с программным обеспечением MACS.

Рис. 4. Контроллер MSC с ПО MACS
Энергосбережение: система SCP
Новейшая система частотного регулирования насосов SCP System для машин литья под давлением включает в себя:
- Радиально-поршневой насос RKP
- Высокодинамичный бесколлекторный электрический сервомотор
- Модульный многоосевой программируемый сервопривод Motion Control (MSD)
Результаты производственных испытаний
| Режим работы | Энергоэффективность | Экономия |
|---|---|---|
| Средняя нагрузка | Повышение на 20…30% | — |
| Холостой ход | — | Сокращение на 90% |
| Частичная нагрузка | — | Снижение шума на 9 дБА |
| Высокое давление, малый расход | — | Экономия до 90% |
Конструкция системы
Компактная система с модульной интегрированной конструкцией:
- ✓ Легко вписывается в оборудование
- ✓ Снижает уровень шума на 9 дБА в условиях частичной нагрузки
«Умный» сервопривод MSD с уникальными алгоритмами управления:
- ✦ Оптимизирует значения частоты вращения насоса и крутящего момента в различных переходах цикла работы литьевой машины
- ✦ Способен взаимодействовать с внешними системами по шине
Сдвоенный насос
При необходимости может устанавливаться сдвоенный насос, секции которого переключаются с целью повышения эффективности работы двигателя и энергосбережения.
В этом случае в периоде цикла с высоким давлением и малым расходом экономия энергии может достигать 90%.
Погружной агрегат
Разработаны опции с погружным насосным агрегатом, расположенным под уровнем РЖ в баке, что позволяет:
- ✦ Улучшить теплорассеяние
- ✦ Уменьшить размеры электродвигателя
По мнению специалистов система SCP имеет существенные преимущества по сравнению как с гидравлическими, так и с чисто электрическими системами управления движением, в том числе с точки зрения сокращения затрат на техобслуживание.
Электрогидростатические приводы (EHA)
В настоящее время ведутся работы над внедрением в общее машиностроение комплектных электрогидростатических приводов (или автономных приводов с объемным регулированием — ЕНА), разработанных ранее для авиации.
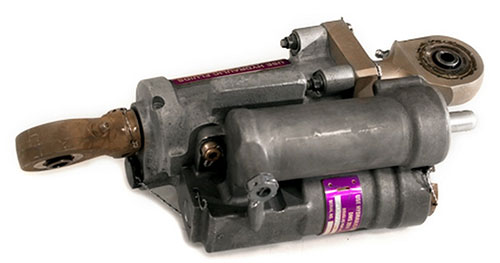
Рис. 5. Электрогидростатический привод EHA
Концепция EHA
Приводные механизмы концепции EHA соединяются с энергетической установкой и системой управления только электрическими проводами.
Это обеспечивается путем замены:
- ✖️ Редукторов
- ✖️ Шариковинтовых передач
на:
- ✓ Гидроцилиндры
- ✓ Насосы
- ✓ Компактные масляные баки (часто оформляются в виде аккумуляторов)
Преимущества EHA
| Преимущество | Характеристика |
|---|---|
| Развиваемые усилия | Существенное увеличение |
| Энергосбережение | Повышение эффективности |
| Надежность | Повышенная |
| Безопасность | В том числе экологическая |
| Компактность | Улучшенная |
| Техобслуживание | Облегченное |
| Интеграция компонентов | Оптимальное сочетание электрических и гидравлических |
Промышленная версия
На выставке в Нюрнберге (ноябрь 2011 г.) впервые демонстрировался прототип общепромышленной версии привода, содержащий объединенные в едином агрегате:
- Сервоцилиндр
- Насос
- Гидроблок с аппаратурой
- Аккумулятор
- Контроллер
- Программное обеспечение

Рис. 6. Промышленная версия привода EHA
Принцип работы
ЕНА получает электроэнергию по проводам и преобразует входной сигнал в движение, причем приводной электродвигатель вращается в том или ином направлении только в процессе выполнения заданной команды и через гидравлическую трансмиссию перемещает шток цилиндра в требуемую сторону.
Результаты внедрения
| Показатель | Результат |
|---|---|
| Снижение веса | на 40% |
| Стоимость | Уменьшена |
| Износ | Уменьшен |
| Надежность | Повышена |
| Комплектная поставка | Обеспечена |
| Загрязнение окружающей среды | Полностью исключено |
Регулирование движения
Это перспективное направление поддерживается уже многими мировыми лидерами гидравлики, причем существуют варианты со встроенными:
- ✦ Позиционными датчиками
- ✦ ДГР, осуществляющими реверс движения гидроцилиндра и его высокоточное и жесткое позиционирование
В целях сокращения потерь мощности в процессе движения на повышенных скоростях:
- Золотник ДГР открывает достаточно большие проходные сечения
- Скорость гидроцилиндра регулируется путем изменения частоты вращения приводного электродвигателя (частотное регулирование)
Таким образом обеспечивается плавный переход от дроссельного метода регулирования к объемному, т. е. достигается высокая точность позиционирования при минимуме энергетических потерь.
Промышленное применение: от турбин до гексаподов
Электростанции
На электростанциях с паровыми турбинами мощностью до 1500 МВт, использующих ископаемое топливо, геотермальное тепло или атомную энергию, остро стоит проблема высокоточной стабилизации частоты вращения генератора, вырабатывающего переменный ток 50 или 60 Гц в условиях суточного колебания энергопотребления.
Кроме того, от систем, регулирующих подачу пара в турбину, требуется высочайшая надежность, поскольку при появлении неисправности турбина может пойти в разнос.
Традиционная система
Современные гидросистемы привода клапана подачи пара содержат:
- ✦ Подпружиненный цилиндр с позиционной обратной связью
- ✦ Пропорциональный гидрораспределитель с внешней аналоговой электроникой
В случае аварийной ситуации пружина способна закрыть клапан.
Недостатки:
- ✖️ Затрудняет ввод в эксплуатацию (необходима тщательная настройка 6–7 датчиков)
- ✖️ Плохо контролируется
- ✖️ Требует участия при пусконаладке опытного персонала
Модернизированная система
В модернизированной системе для турбины фирмы Alstom взамен старого ДГР типа D072 использован ДГР типа Axis Control Valve (ACV) с интегрированной цифровой электроникой и двумя контурами управления: внутренним и внешним для управления всем приводом.
Рис. 7. Модернизированная система с ACV
Преимущества ACV
| Преимущество | Описание |
|---|---|
| Исключение трудоемкой настройки | Цифровые параметры легко перезагружаются в новый аппарат |
| Полуавтоматическая калибровка | При замене позиционного датчика в ACV |
| Мониторинг состояния | В том числе дистанционный при эксплуатации |
| Исключение внешней системы управления | Встроенная цифровая электроника |
| Дополнительная диагностика | С помощью встроенного в ACV датчика давления |
| Легкая интеграция | В существующие системы, в том числе аналоговые |
Вновь разработанные системы уже успешно эксплуатируются на электростанциях в Германии, Дании, Испании, Австралии и Швейцарии.
Ветрогенераторы
Электрогидравлические приводы применяются для разворота лопастей ветрогенераторов, в подшипниках скольжения и в ряде случаев — для гидростатических передач.
В результате эксплуатации более 30 тыс. ветроустановок во всем мире накоплен богатейший опыт в области управления ветроэнергетическими системами.
Платформы-гексаподы
Высокодинамичные электрогидравлические платформы-гексаподы грузоподъемностью до 680 кг способны отрабатывать частоту управляющего воздействия до 100 Гц.

Рис. 8. Платформа-гексапод
Применение гексаподов
| Область применения | Примеры | Характеристики |
|---|---|---|
| Тренажеры | Авиационные, автомобильные | Высокая динамика |
| Испытательные стенды | Прочностные испытания | Точность позиционирования |
| Аттракционы | Развлекательные комплексы | Безопасность |
| Центр Kempflo (Нанкин, Китай) | Статические и динамические испытания | |
| Испытания болидов | «Формула-1» | Высокоточные тесты |

Рис. 9. Гексапод для испытаний кузова автомобиля
Стабилизатор Ampelmann
Весьма оригинальный пример применения электрогидравлического гексапода — стабилизатор положения платформы компании Ampelmann, выполняющей шельфовые работы по обслуживанию ветряных двигателей.
Здесь для компенсации волнения моря до ±3 м на палубе обслуживающего судна установлена платформа-гексапод, управляемая в режиме on-line от гироскопического датчика, контролирующего перемещения по трем осям и через систему управления воздействующего на силовые гидроцилиндры таким образом, чтобы верхняя часть платформы сохраняла стационарное положение независимо от перемещений палубы.

Рис. 10. Стабилизатор Ampelmann
(Кстати, — идеальное решение для людей, страдающих морской болезнью).
Установленная на верхней части платформы телескопическая направляющая может поворачиваться и раздвигаться на достаточную длину для выполнения ремонтно-профилактических работ.
Другие применения
Возможно применение аналогичных технологий, например, для:
- ✦ Повышения сейсмоустойчивости зданий и сооружений
- ✦ Снижения вибраций станков и механизмов
Заключение: инновации в гидроприводе
В заключение можно отметить, что благодаря подобной инновационной деятельности высокоинтеллектуальная электрогидравлическая техника продолжает интенсивно развиваться.
Ключевые достижения
| Направление | Достижение | Преимущество |
|---|---|---|
| Насосы RKP-D | Цифровое управление, Plug&Play | Гибкость, простота замены |
| Сервозолотники D636-D675 | Встроенная электроника, интерфейсы | Точность, диагностика |
| Система SCP | Частотное регулирование | Экономия энергии до 90% |
| Приводы EHA | Объемное регулирование | Снижение веса на 40% |
| Платформы-гексаподы | Высокая динамика |
В. К. Свешников, к. т.н., ЭНИМС,
Потапов С. Н., инж. Нижегородского филиала фирмы Moog
Литература
- Свешников В. К. Гидроприводы — итоги 2012 года//РИТМ. 2013. № 4. С. 156–164.

