Однако экономических преимуществ можно достичь лишь в том случае, если применяемые металлообрабатывающие станки и их системы управления способны осуществлять контурную подачу с более высокой скоростью по сравнению с традиционной обработкой.
Быстрые и высокоточные перемещения станка требуют прецизионного управления процессами разгона и торможения по запрограммированной траектории. В условиях конфликта интересов между временем обработки, качеством обработанной поверхности и геометрической точностью современные системы управления должны обеспечивать оптимальные соотношения, как для станка, так и для технологического процесса. Кроме того, оператору нужна возможность простым изменением параметров воздействовать на результат фрезерования.
Управление траекторией перемещения системой ЧПУ оказывает решающее воздействие на оптимизацию времени обработки при имеющихся требованиях к точности и качеству поверхности.
HSC в инструментальном производстве: требования к системам управления металлорежущих станков
Технология HSC предлагает много новых возможностей обработки закаленных и легированных инструментальных сталей. Поэтому наряду с классической электроэрозионной обработкой HSC-фрезерование прессформ из твердых материалов приобретает серьезное экономическое значение. По сравнению со стандартной фрезерной существенное преимущество обработки по технологии HSC заключается в распределении и отводе возникающего в процессе резания тепла. Высокие скорости резания и контурной подачи в сочетании с небольшой глубиной резания обеспечивают отвод большей части выделяющегося при резании тепла в стружку.
Рис. 1a. Обработка поверхности свободной формы (плоскость с двойным изгибом)

Рис. 1b. Испытательный стенд с прибором KGM 182
HSC-обработка: параметры и факторы
При HSC-обработке с высокими скоростями подачи неизбежно возникает требование к повышенным ускорениям на изогнутых контурах заготовки. А это выводит на передний план мехатронные характеристики металлообрабатывающего станка. При возрастании ускорений приводов подач на конструкцию станка действуют увеличенные инерционные силы. Как следствие также возрастает риск возникновения вибраций станка, что может привести к ухудшению качества обработанной поверхности. Поэтому системе управления требуется стратегия управления траекторией перемещения, которая минимизирует время обработки и одновременно обеспечивает оптимальное качество поверхности при соблюдении заданной точности контура. При этом система управления должна предоставлять возможность оптимизации управления траекторией перемещения, как производителю станка, так и его оператору.
Из этого вытекает требование к производителю станка по адаптации системы управления к его характеристикам. Для этого система управления должна обладать четко структурированной концепцией параметрирования для управления траекторией перемещения и для контуров регулирования двигателей подач. Часто металлорежущие станки оцениваются на основании разнообразия номенклатуры изготавливаемых деталей. Для каждой операции обработки нужно обеспечивать, чтобы даже при высоко динамичных перемещениях по контуру возникающие вибрации станка не приводили к дефектам поверхности заготовки. Поэтому баланс между системой управления и станком должен обеспечивать высокую надежность при механической обработке.
Система управления должна давать оператору возможность учитывать индивидуальные требования по времени обработки и точности заготовки. Заданные требования должны быть реализованы уже при изготовлении первой детали без длительного периода пробных прогонов. Требования должны задаваться в управляющей программе, чтобы обеспечить четкую привязку к конкретной производственной задаче. Кроме того, чтобы удержать время обработки в приемлемых рамках, поверхности свободной формы часто фрезеруются с реверсированием соседних траекторий. При этом система управления должна обеспечивать повторяемые траектории движения инструмента при обработке контура в обратном направлении. Иначе следует ожидать дефектов качества обработанной поверхности.
Влияние обработки данных на точность заготовки
Изготовление детали лезвийной механообработкой требует многочисленных промежуточных шагов, в ходе которых данные геометрической CAD-модели преобразуются в траектории инструмента:
- CAD (Computer Aided Design – система автоматизированного проектирования): контур заготовки обычно воспроизводится с помощью NURBS (Non uniform rational B-Splines – неравномерные рациональные В-сплайны). С помощью NURBS математически описываются поверхности свободной формы.
- CAM (Computer Aided Manufacturing – автоматизированная система управления производством): траектории инструмента рассчитываются по точкам из CAD-геометрии с учетом стратегии фрезерования и коррекции инструмента. При этом предварительно заданная хордовая погрешность (точность модели) определяет расстояние между точками.
- CNC (Computerized Numerical Control – числовое программное управление): управляющая программа по точкам преобразовывается в движения осей и профили скорости. При этом учитываются заданные значения допуска траектории. Для достижения высокого качества обработанной поверхности погрешности между соседними траекториями фрезерования должны быть существенно меньше, чем заданные допуски траектории.
- Мехатроника: движения осей находятся в жесткой временной сетке в форме заданных и фактических перемещений и посредством геометрии станка преобразуются в движения инструмента или заготовки. Ошибки рассогласования осей подач, отклонения от заданной геометрии станка, термические воздействия и вибрации станины и приводов могут негативно повлиять на точность заготовки.
Коррекция инструмента
Управление перемещением по траектории
Контроль допуска
Профили скорости
Станок и приводы
С точки зрения оптимизации времени обработки, качества обработанной поверхности и точности заготовки к уЧПУ предъявляются следующие основные требования:
- эффективный контроль допусков контура,
- точное воспроизведение соседних траекторий при реверсе,
- эффективное предотвращение вибраций при высокодинамичных перемещениях.
Воздействие цепочки обработки данных на точность заготовки при двухмерных контурных перемещениях можно изучить с помощью измерительного прибора KGM 182 компании HEIDENHAIN. Характеристики управления перемещением по траектории системы управления iTNC 530 компании HEIDENHAIN показаны на примере имитации портального станка. При этом KGM служит для оценки достижимой точности контура.
Быстро, точно, четко по контуру: высокоскоростное фрезерование с iTNC 530
Эффективный контроль допусков контура
Управляющие программы для поверхностей свободной формы создаются, как правило, в CAM-системе и состоят из простых прямолинейных отрезков. Системы управления HEIDENHAIN автоматически сглаживают переходы между отрезками, благодаря чему инструмент непрерывно перемещается по поверхности заготовки. Автоматическим сглаживанием управляет внутренняя функция контроля погрешностей контура. Данная функция (Цикл 32) дает оператору возможность произвольно устанавливать допустимые погрешности контура. Предустановленным является значение, которое производитель станка закладывает в машинных параметрах системы ЧПУ (типичное значение от 0,01 до 0,02 мм). Дополнительно допуск действует также при перемещениях по запрограммированным дугам окружности.
В самом неблагоприятном случае отклонения от геометрии CAD-модели поверхности свободной формы может складываться из суммы заданного допуска контура и установленной в CAM-системе хордовой погрешности. Итоговый результат, выраженный в изготовленной детали, зависит от всех характеристик станка и установленных значений рывков и ускорений осей подач.
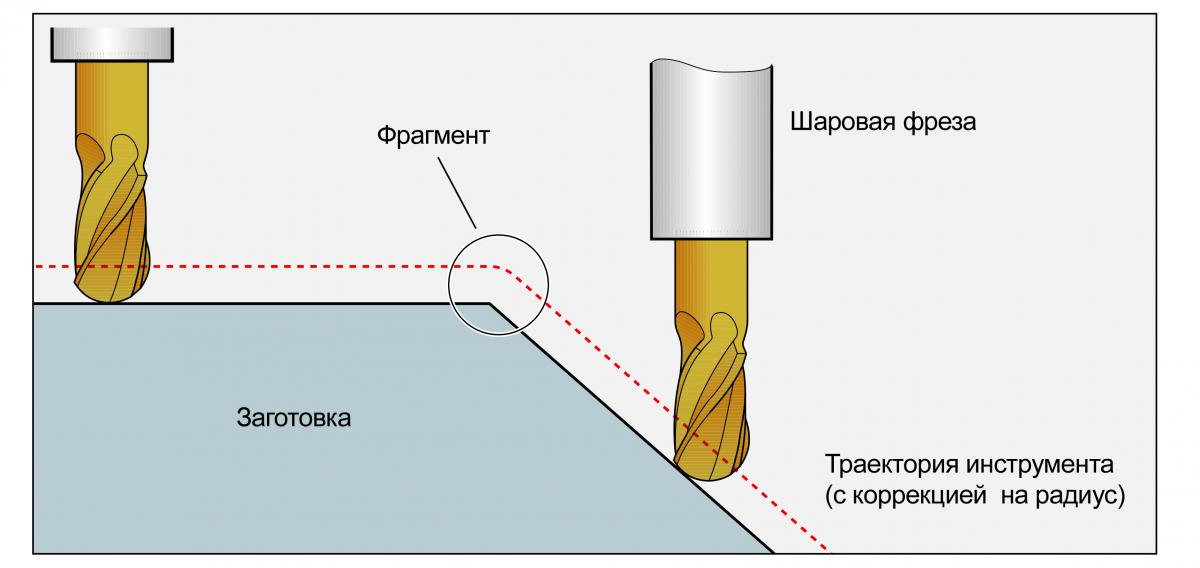
Рис. 2. Траектория TCP шаровой фрезы
Показанный на рисунке угол заготовки (рис. 2) требует круговой траектории центра шаровой фрезы (TCP = Tool Center Point – точка центра инструмента). Без сглаживания заданных характеристик траектории ось Y станка должна была бы резко ускориться в переходной точке. Возникающий от этого рывок возбуждает в станке значительные вибрации. К тому же обычные приводы не могут генерировать бесконечный рывок, что обусловлено границами их физических свойств. Поэтому без дополнительных мер управления траекторией перемещения неизбежно возникают погрешности траектории, которые, в зависимости от изменений кривизны траектории и скорости движения по траектории, могут достигать значительных величин.
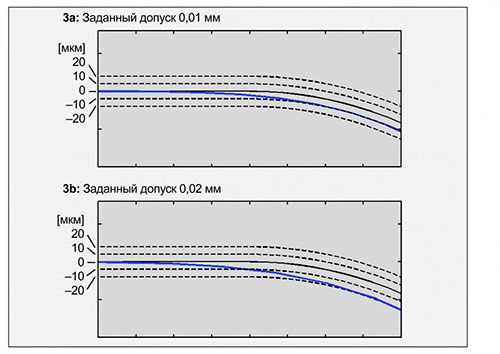
Рис. 3. Увеличенное изображение заданной траектории TCP по контролируемому контуру
Управление траекторией перемещения в системе iTNC 530 обеспечивает сглаживание рывков, при этом заданный допуск контура выдерживается даже при сильных изменениях скорости движения по контуру (рис. 3). Можно задать более грубое значение допуска, что позволяет существенно сократить время обработки. В показанном примере время обработки уменьшается примерно на 12% при увеличении допуска контура с 0,01 мм до 0,02 мм.
Высокая повторяемость соседних траекторий с реверсом
На рисунке 4 показан фрагмент заготовки, а также соответствующие линейные отрезки движения TCP. При фрезеровании соседние траектории были получены прямыми и реверсивными проходами (строчное фрезерование с реверсом). Отдельная траектория состоит из небольшого количества прямых отрезков различной длины. Заданная в CAM-системе хордовая погрешность составляет 3 мкм.
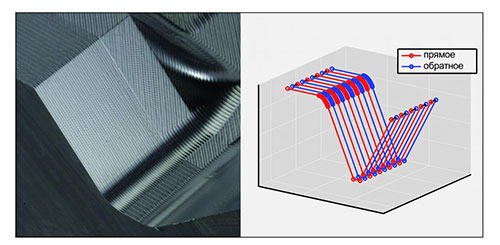
Рис. 4. Контур заготовки и соответствующие линейные отрезки с прямым и реверсивным перемещением. Отмеченные точки показывают точки данных программы
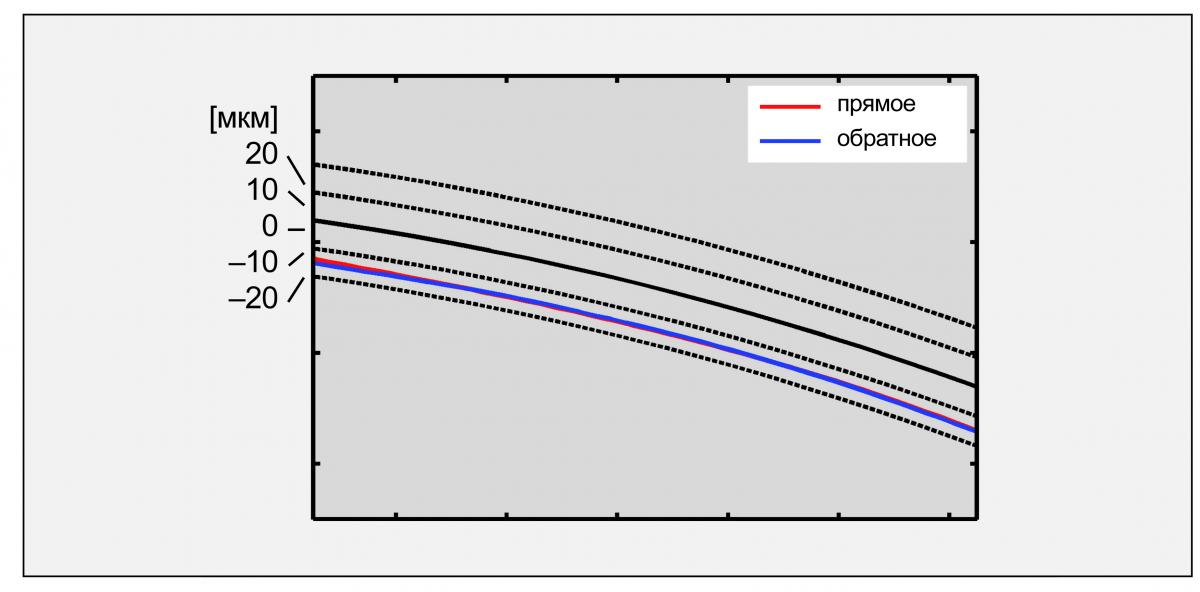
Рис. 5. Погрешность траектории движения инструмента в изогнутой области контура заготовки (подача = 10 м/мин,
допуск = 0,01 мм).
На рисунке 5 увеличено показана погрешность перемещения инструмента по сравнению с запрограммированным контуром. Погрешности относятся к идеальному переходу прямая-окружность, в то время как управляющая программа (рис. 4) состоит из линейных отрезков с хордовой погрешностью 3 мкм относительно модели. Хордовая погрешность действует только в зонах изгибов и перекрывает заданный в системе ЧПУ допуск контура. Системы управления HEIDENHAIN достигают очень высокой повторяемости движений строчного фрезерования с реверсом направления (рис. 5). Погрешности контура между прямыми и обратными траекториями практически отсутствуют, благодаря чему можно добиться очень высокого качества обработанной поверхности.
а) 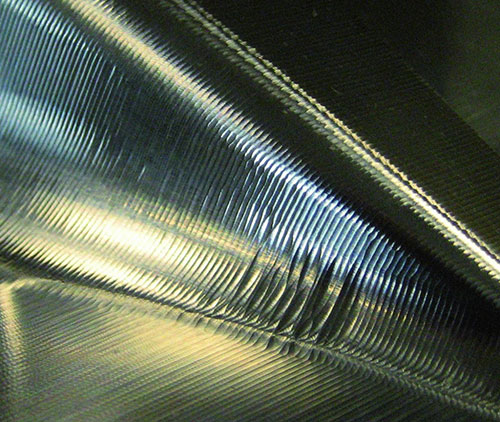 b)
b) 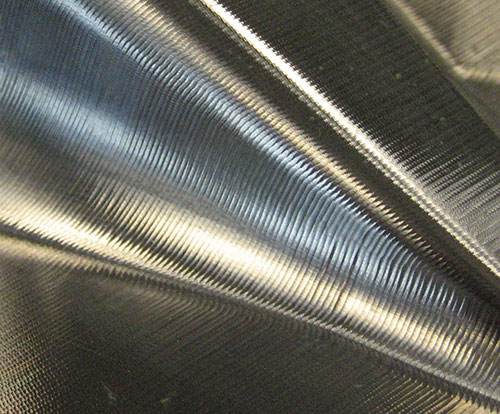
Рис. 6. Процесс строчного фрезерования с реверсом: повторяемость соседних траекторий фрезерования
6a: Различия между соседними траекториями приводят к плохому качеству обработанной поверхности
6b: Результат фрезерования с помощью iTNC 530: равномерная поверхность при прямых и реверсивных перемещениях
На фотографиях заготовки на рисунке 6 показаны различия, достигаемые с помощью оптимизированного управления траекторией перемещения. Данные поверхности свободной формы получены путем строчного фрезерования с реверсом перемещений (запрограммированная подача 10 м/мин, припуск на чистовую обработку 0,1 мм). Качество поверхности показанной на рисунке 6а заготовки неприемлемо. В показанном на рисунке 6b результате обработки с помощью iTNC 530 отчетлива видна высокая повторяемость соседних траекторий.
Эффективное предотвращение колебаний при высокодинамичных перемещениях
Требуемые для HSC-фрезерования скорости подачи ставят перед системами управления металлорежущих станков серьезные задачи. Высокая скорость обработки возможна лишь в том случае, если реализуется высокая скорость контурной подачи. Однако на малых радиусах траектории фрезерования нужно резко уменьшать скорость, чтобы удержать погрешности контура в диапазоне допуска. Маневры ускорения и торможения могут вызвать дополнительные вибрации станины, которые отрицательно влияют на качество обработанной поверхности.
В уникальном управлении траекторией перемещения систем ЧПУ компании HEIDENHAIN рывки и ускорения сглаживаются. Тем самым можно очень эффективно предотвращать вибрации станка.
При необходимости система управления автоматически уменьшает запрограммированную подачу, чтобы уменьшить возбуждение вибраций до минимума. Благодаря эффективному предотвращению вибраций станка управляющая программа отрабатывается с очень высокой скоростью, что обеспечивает существенный выигрыш времени обработки.
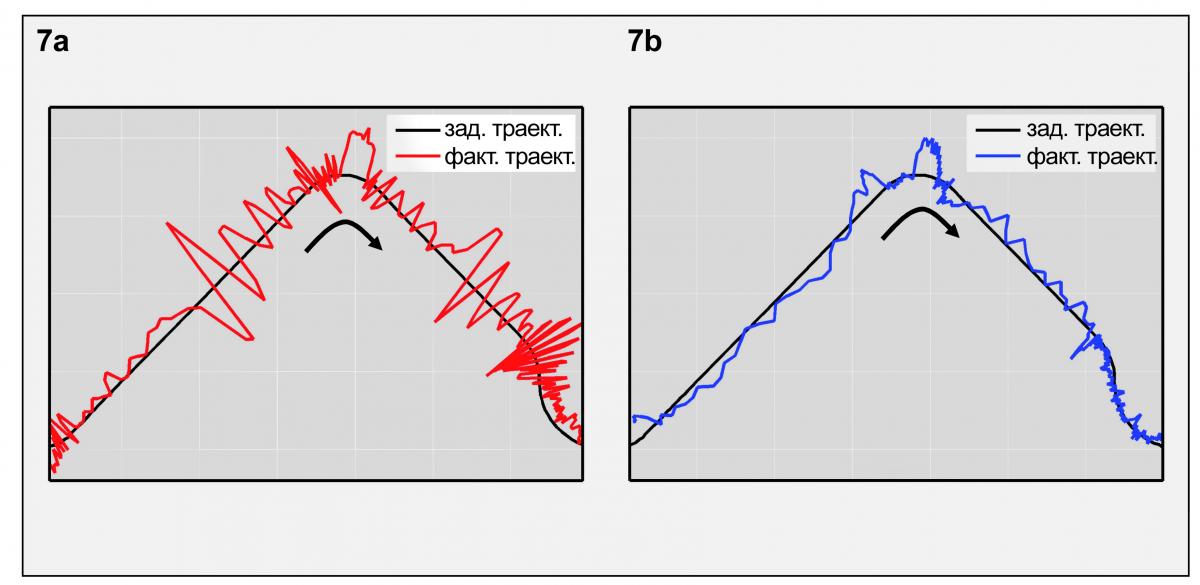
Рис. 7. Измеренная двухкоординатным измерительным прибором фактическая траектория на скругленном углу без (7а) и с (7b) фильтрацией заданных значений положения NC-данных.
На рисунке 7 показаны фактические перемещения металлорежущего станка при обработке двухмерного контура. Без сглаживания рывков в фазах ускорения станка появляются вибрации (рис. 7а). С помощью управления траекторией перемещения системы iTNC 530 компании HEIDENHAIN вибрации эффективно предотвращаются (рис. 7b). Показанная на рисунке8 обработанная поверхность еще раз отчетливо демонстрирует преимущества управления траекторией перемещения систем ЧПУ компании HEIDENHAIN. Движение по траектории изображенного кругового сегмента требует адаптации ускорений осей в каждой точке, из-за чего обычно возникают вибрации станка (рис. 8а). Посредством сглаживания рывков система управления iTNC 530 обеспечивает высокое качество обработанной поверхности без негативного влияния вибраций (рис. 8b).
a) 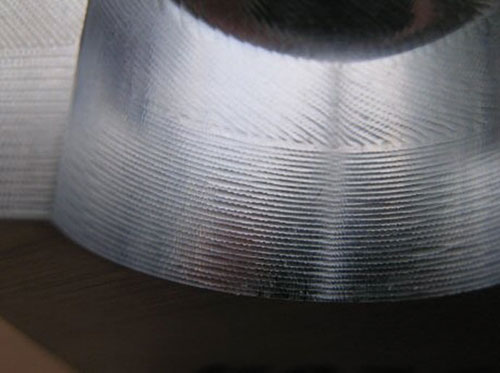 b)
b) 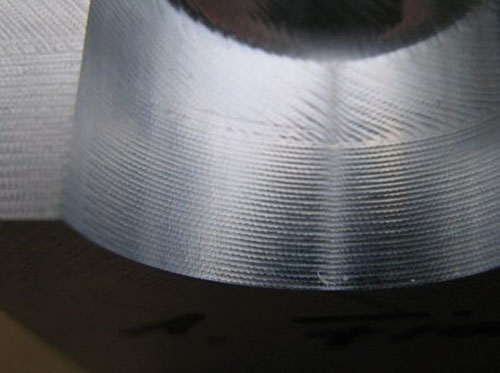
Рис. 8. Воздействие вибраций станка на заготовку:
8a: Без сглаживания рывков возникающие по оси Z вибрации ведут к появлению бороздок на поверхности
8b: Управление траекторией перемещения системы iTNC 530 целенаправленно устраняет дефекты поверхности, вызываемые вибрациями
Обобщение
Технологические процессы в инструментальном производстве, в самолетостроении и производстве космических аппаратов в существенной мере определяются технологией HSC-фрезерования. Требуемые скорости подачи ставят перед системами управления металлорежущих станков серьезные задачи. В условиях конфликта интересов между временем обработки, точностью контура и качеством обработанной поверхности система управления iTNC 530 компании HEIDENHAIN обеспечивает существенные преимущества. При этом перемещения по траектории планируются так, чтобы:
• избегать вибраций станка,
• выдержать требования к точности,
• минимизировать время обработки.
Кроме того iTNC 530 обеспечивает высокую повторяемость соседних траекторий фрезерования, что обеспечивает реализацию высочайших требований к качеству обработанной поверхности и сокращении времени обработки при строчном фрезеровании с реверсом.
Система управления iTNC 530 задает новые стандарты в согласовании между собой системы управления, приводов и станины станка. Таким способом обеспечивается возможность обработки широкого спектра изделий с высоким качеством уже с первой детали.
Ознакомиться с полным ассортиментом продукции компании HEIDENHAIN и проконсультироваться по вопросам ее применения и использования Вы сможете на выставке «Металлообработка-2013» (27–31 мая, г. Москва, ЦВК «Экспоцентр») – наш стенд 21D65 в павильоне 2.1.
Dr. Jens Kummetz (DR. JOHANNES HEIDENHAIN GmbH)
к.т.н. Сладков Д.В. (ООО «ХАЙДЕНХАЙН»)
ООО «ХАЙДЕНХАЙН»
+7 (495) 931 9646
www.heidenhain.ru
info@heidenhain.ru
"

