Преимущества гидравлики: мощь и надежность
Исключительные силовые характеристики
«Гидравлические» оппоненты выдвигают свои доводы. И они весомы. Гидравлика обладает исключительными силовыми характеристиками. Представьте: домкрат с диаметром цилиндра 100 мм и приводом от ручного насоса развивает усилие 550 кН! Это серьезно.
Но это не всё. Быстродействие позволяет отрабатывать заданное воздействие с частотой до нескольких сотен герц. Широкий диапазон регулирования. Возможность защиты от перегрузки и точного контроля сил. А также аккумулирование энергии.
Простота реализации прямолинейного движения. Идеальная защита от внешних загрязнений — в том числе работа под водой. Обширная номенклатура механизмов управления. Высокая долговечность.
| Показатель | Гидропривод | Электропривод | Преимущество |
|---|---|---|---|
| Предельная силовая напряженность | 40-90 МПа | 4-10 МПа | В 9 раз выше |
| Предельные угловые ускорения | 10⁴ 1/с² | 10³ 1/с² | В 10 раз выше |
| Массовая отдача источников энергии | 0,1-0,4 кг/кВт | 1-4 кг/кВт | В 10 раз лучше |
| Массовая отдача исполнительных механизмов | 0,3-0,4 кг/кВт | 2-30 кг/кВт | В 75 раз лучше |
| Общий КПД | 0,7-0,9 | 0,6-0,7 | Выше |
| Число отказов в автоматизированных системах | 2-10% | 70-90% | В 9 раз надежнее |
Интенсивность отказов (λ·10⁶) источников энергии составляет 2-50 1/ч против 10-20 у электроприводов. Приводы показывают 1-10 1/ч против 10-100. Чувствуете разницу?
Кроме того, применение гидроприводов позволяет снять проблемы изоляции, коммутации, управления высоким напряжением, пожароопасности (при использовании негорючих жидкостей), влияния электромагнитных полей, чувствительности к режимам остановки под нагрузкой.
Легко реализуется многократное резервирование. Что же касается «роковых» недостатков, то современные уплотнения обеспечивают полную герметичность. А шум большинства гидромашин уже снижен до минимально возможного уровня.
Электрогидравлический симбиоз: идеальное сочетание
Принцип работы комбинированных систем
Таким образом, мы видим два технических решения с ярко выраженными достоинствами и недостатками. Возникает идея их объединения в едином электрогидравлическом приводе.
Он содержит электрические управляющие и приборные средства (датчики обратной связи и др.), а также гидравлические силовые исполнительные двигатели.
Эта идея не отличается особой новизной. Однако в последнее время она получает опережающее развитие. Как бы подтверждая природную мудрость: электрика — это нерв, а гидравлика — мускул движущегося объекта.
Точно подмечено, не правда ли?
Простейшим симбиозом электрики и гидравлики являются приводы с использованием электрореологических жидкостей. Обычно это взвесь порошка карбонильного железа в масле. Они способны изменять свою вязкость под воздействием электрического поля высокого напряжения и незначительной мощности.
В рамках национальной программы в Германии уже создаются промышленные образцы приводов, отличающихся рекордным быстродействием. Постоянная времени τ ≤ 1 мс. Это впечатляет.
Имеются сообщения об использовании электрореологических жидкостей в электроуправляемых муфтах сцепления с целью стабилизации крутящего момента. Что оказывается дешевле и надежнее, чем применение двигателей постоянного или переменного тока, управляемых электронным способом.
Пропорциональные гидрораспределители
Аппараты связи микропроцессорных систем
В электрогидравлических приводах особое значение приобретают аппараты связи микропроцессорных систем управления с гидравлическими силовыми исполнительными двигателями.
Это дросселирующие (ДГР) или пропорциональные (ПГР) гидрораспределители. В том числе «интеллектуальные» или «мехатронные» — со встроенными электронными устройствами управления.
Дросселирующие распределители ДГР
ДГР обладают идеальными статическими и динамическими характеристиками. Однако отличаются сложностью конструкции. Требуют сверхпрецизионного изготовления определяющих деталей и максимальной степени очистки рабочей жидкости.
В качестве примера на рис. 1 показаны новейшие однокаскадные ДГР типа DFplus® фирмы Parker и LSVG-03 фирмы Yuken с электродинамическим преобразователем типа «подвижная катушка».
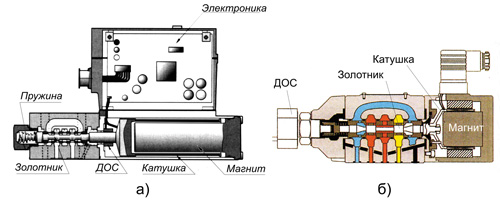
Рис. 1. Однокаскадные ДГР фирм Parker (а) и Yuken (б)
Встроенные электронный блок управления и датчик обратной связи (ДОС). Минимальная масса подвижных частей и большое перестановочное усилие (до 100 Н) позволяют получить очень высокие динамические характеристики.
Полоса пропускания до 350-450 Гц. Это уровень современных сервоприводов.
Пропорциональные распределители ПГР
ПГР выполняются на базе пропорциональных электромагнитов. Существенно проще конструктивно и технологически. Имеют большую степень унификации с обычными электроуправляемыми гидрораспределителями.
Не требуют сверхтонкой фильтрации. Это важно для эксплуатации.
Типичный двухкаскадный ПГР фирмы Bosch Rexroth (рис. 2) состоит из корпуса 1, главного золотника 2, датчиков обратной связи 3 второго каскада и 6 первого, пилота 4, гильзы 5, пропорциональных электромагнитов 7 и 8, пружины 9 и встроенного микропроцессорного блока управления 10.
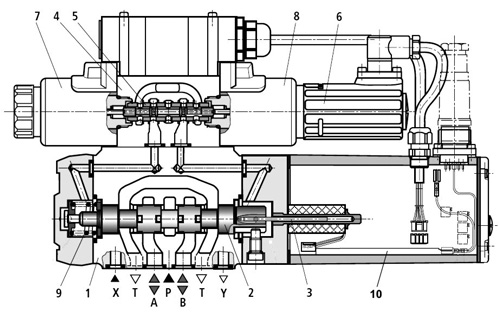
Рис. 2. Двухкаскадный ПГР фирмы Bosch Rexroth
Кроме ДГР и ПГР, реализующих управление скоростью и направлением движения гидродвигателей (цилиндров и гидромоторов), существует большое количество аппаратов пропорционального управления давлением (клапаны) и расходом (дроссели и регуляторы расхода) рабочей жидкости.
Они имеют разнообразные исполнения по способу монтажа. Удобно для интеграции.
Интеллектуальные насосы с электроуправлением
Пропорциональное регулирование подачи
Пропорциональное электроуправление широко используется в регулируемых гидромашинах (насосах и гидромоторах). Одно из ведущих отечественных предприятий — ОАО «Пневмостроймашина» — освоило производство насосов 313.3.107.056.
Они содержат управляющий ПГР, датчик обратной связи по углу наклона качающего узла (величине подачи насоса) и встроенный электронный блок управления (рис. 3).
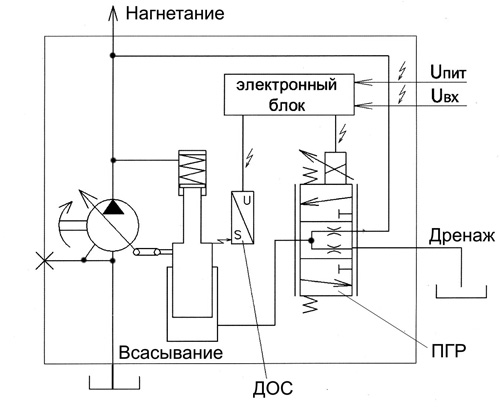
Рис. 3. Схема пропорционального регулирования насоса 313.3.107.056 ОАО «Пневмостроймашина»
Основные преимущества новой модели разработчики видят в возможности создания «интеллектуальной» комплексной системы с расширенными функциональными свойствами.
Гибкое изменение закона регулирования. Обеспечение дистанционного электроуправления от джойстиков, педалей или клавиатуры ПК. Обмен данными с различными составными частями комплектуемой машины через полевые шины CAN и др.
Уменьшение числа трубопроводов. В микроконтроллер блока управления может вводиться «базовый» или «небазовый» алгоритм.
Причем в последнем случае возможен учет сигналов, поступающих с дополнительных ДОС комплексной электрогидравлической системы.
Регулируемые насосы ряда фирм комплектуются так называемыми p/Q-регуляторами. Они содержат датчики давления и подачи, которые позволяют существенно улучшить регулировочные характеристики.
Точное позиционирование гидроцилиндров
Магниторезистивные датчики положения
Высокоточное позиционирование гидроцилиндров (разрешение ± 0,03% от полного хода) достигается, например, путем использования системы CIMS фирмы Bosch Rexroth (рис. 4).
Основой которой является встроенный в крышку цилиндра компактный магниторезистивный датчик. Он взаимодействует со штоком, на котором под слоем керамического покрытия нанесены волнообразные риски синусоидальной формы.
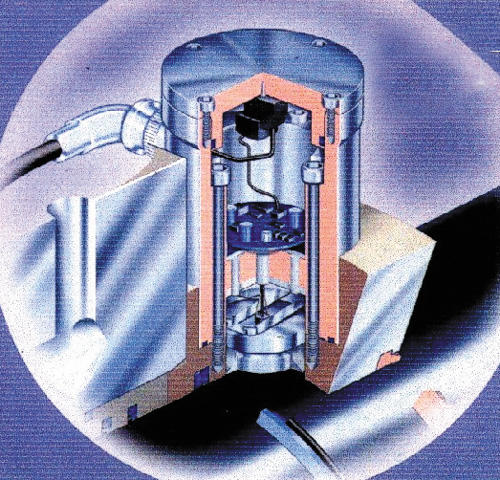
Рис. 4. Система CIMS фирмы Bosch Rexroth
По своим динамическим характеристикам и точности новая гидравлическая ось той же фирмы (рис. 5) является оптимальным приводным устройством, например, для распиловочной техники.
Компактный узел с гидроцилиндром, быстродействующим ДГР со встроенной электроникой и высокоточной позиционной измерительной системой отвечает самым современным требованиям надежности.
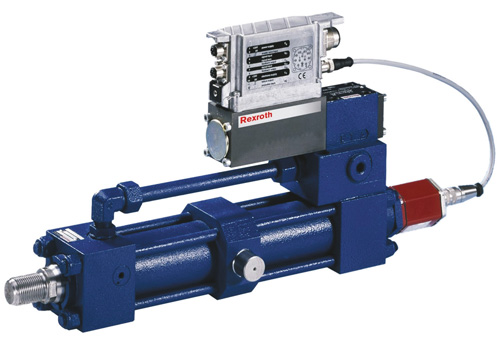
Рис. 5. Гидравлическая ось IAC-R фирмы Bosch Rexroth
Компактные малошумные модули
Интеграция насоса и электродвигателя
Примером взаимопроникновения электрики и гидравлики могут стать малошумные компактные модули фирмы Hawe (рис. 6).
Они состоят из расположенных в общем корпусе насоса и электродвигателя, которые находятся под уровнем рабочей жидкости. Причем гидроаппаратура и, возможно, аккумулятор располагаются снаружи на гидропанелях.
Узел может комплектоваться воздушным теплообменником.
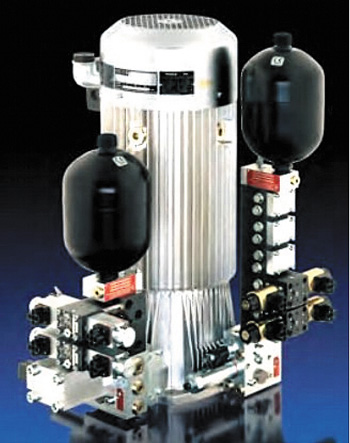
Рис. 6. Малошумный компактный модуль фирмы Hawe
Подобные решения называют «интеллигентной гидравликой, которую не видно и не слышно» (whispering power unit). В некоторых установках для пищевой промышленности насос расположен внутри ротора приводного электродвигателя.
Это элегантно, не правда ли?
Промышленное применение электрогидравлики
Гидроабразивная резка сверхвысокого давления
Наиболее ярким примером электрогидравлического симбиоза являются современные установки для гидроабразивной резки. В них рабочее давление уже достигает 600 МПа.
Здесь гидравлические инструменты представляют собой рабочий инструмент (струя воды, текущая со скоростью 1000 м/с из алмазного сопла, смешанного с гранатовым песком) и привод мультипликатора.
Возможно, с пропорциональным регулированием давления. А также электроприводы подачи, диагностические устройства и передовые микропроцессорные системы управления, включая позиционирование с помощью пяти координат.
Накопленный опыт резки самых разнообразных материалов отражен в прилагаемых системах САПР. Они позволяют оператору, помимо геометрии разреза, ограничиться только указанием типа и толщины разрезаемого материала, а также желаемого качества его обработки.
Гидроформинг: инновационная технология
Инновационная технология гидроформования (гидроформинг) фирмы Bosch Rexroth основана на использовании мультипликаторов с давлением 200 или 400 МПа.
Мультипликатор содержит позиционный датчик поршня, ПГР и клапанный блок (рис. 7).
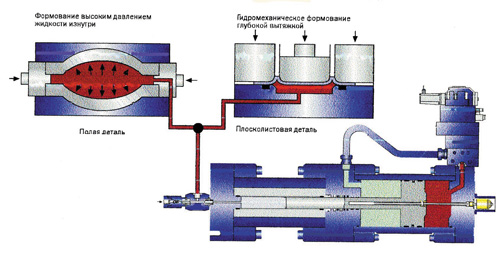
Рис. 7. Технология гидроформования фирмы Bosch Rexroth
Специальный датчик высокого давления (жидкость HFA) обеспечивает точную высокодинамичную регулировку замкнутого контура управления. А также гарантирует требуемую эксплуатационную надежность установки в целом.
Испытательные стенды ЭНИМС
В разработанных ЭНИМСом линейных электрогидравлических приводах стендов для испытаний гидравлических гасителей колебаний транспортных средств (рис. 8) шаговый электродвигатель ШД через винтовую пару 1 обеспечивает осевое смещение золотника 2.
В результате чего шток гидроцилиндра 5 движется в соответствующем направлении и через рейку 4, шлицевое соединение 3 и винтовую пару возвращает золотник в нейтральное положение, после чего движение останавливается.
Требуемый закон движения (гармонические колебания с частотой 0,25-7 Гц и амплитудой до 55 мм или другой) устанавливается за счет соответствующего программирования ШД.
Конечные выключатели КВ1 и КВ2 выдают в систему управления аварийный сигнал при чрезмерном увеличении рассогласования между заданными и фактически отработанными перемещениями штока.
В данном случае применение механической обратной связи позволяет существенно упростить систему и обеспечить ее ремонтопригодность в условиях железнодорожных депо.
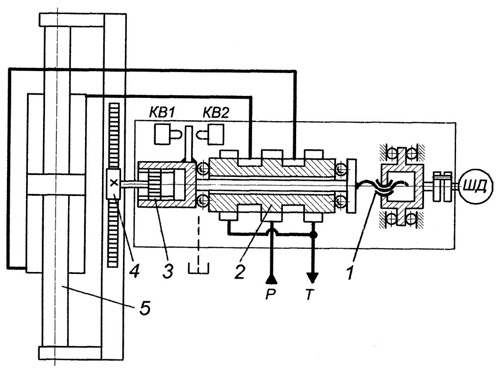
Рис. 8. Схема линейного электрогидравлического привода ЭНИМС
Оценка действующего усилия производится по разности показаний датчиков давления, установленных в полостях гидроцилиндра. А перемещение штока контролируется встроенным позиционным ДОС.
Результаты экспериментов в форме зависимостей пути, скорости и силы по времени| силы от перемещения и силы от скорости выдаются на распечатку в паспорт гасителя колебаний и сохраняются в памяти ПК.
На выпуске высокодинамичных электрогидравлических испытательных стендов уже много лет специализируется один из мировых лидеров — фирма Shenck.
Революция в мобильной технике
Комплексные решения от ведущих производителей
В последние годы электрогидравлические приводы произвели переворот в мобильной технике. Производители которой предпочитают поставлять из одних рук весь комплект гидравлических и электрических (электронных) компонентов.
Гидравлическая трансмиссия фирмы Eaton (рис. 9) состоит из расположенных на общем валу двух аксиально-поршневых насосов с пропорциональным электроуправлением и дополнительного шестеренного насоса.
Двух аксиально-поршневых гидромоторов, гидроаппаратуры управления, электронного усилителя, двухосевого джойстика и программирующих устройств с программным обеспечением, адаптированным под требования гидропривода мобильной машины.

Рис. 9. Гидравлическая трансмиссия фирмы Eaton
Аналогичный комплект (рис. 10) предлагает фирма Parker.
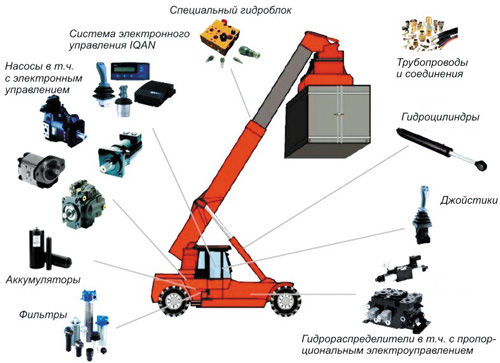
Рис. 10. Комплект электрогидравлического оборудования для мобильной техники фирмы Parker
Перспективы развития электрогидравлических систем
Высокие динамические характеристики
Современные электрогидравлические приводы обеспечивают ускорения до 80g. Скорость хода до 10 м/с. Период собственных колебаний от 0,5 мс.
Электрогидравлика, подключенная к полевой шине, свободно встраивается благодаря открытому интерфейсу в общую систему децентрализованной архитектуры.
При этом все физические особенности элементов гидросистем задаются на уровне программных средств. Что обеспечивает хорошее согласование свойств управляющих систем и агрегатов привода.
| Характеристика | Значение | Применение |
|---|---|---|
| Ускорение | до 80g | Испытательные стенды |
| Скорость хода | до 10 м/с | Высокодинамичные системы |
| Период собственных колебаний | от 0,5 мс | Прецизионное управление |
| Разрешение позиционирования | ± 0,03% от хода | Точные операции |
| Полоса пропускания ДГР | 350-450 Гц | Сервоуправление |
Указанные преимущества позволяют утверждать, что электрогидравлические системы приводов имеют мощный потенциал дальнейшего развития.
Выпускаемые отечественной промышленностью и ведущими зарубежными фирмами, представленными на российском рынке, компоненты электрогидравлических приводов с полной расшифровкой кодовых обозначений, указанием основных параметров, габаритных и присоединительных размеров приведены в работе [4].
Есть над чем подумать. И действовать нужно уже сейчас.
В. К. Свешников, к.т.н., ЭНИМС
Список литературы:
- Долгушев В.Г., Акопов М.Г., Бекетов В.И. Системы оборудования летательных аппаратов: Учебник для вузов (под ред. Матвеенко А.М., Бекетова В.И.) 3-е изд. испр., доп, М.: Машиностроение, 2005.
- Wiech T., Olszak A., Madeja J. и др. Управляемое вязкое сцепление в электрореологической жидкости // Гидравлика и пневматика. 2005. № 19. С. 8-11.
- Караваев В.А., Беляев И.А. Гидромашины с электрогидравлическим управлением производства // Гидравлика и пневматика. 2005. № 19. С. 26-29.
- Свешников В.К. Гидрооборудование: международный справочник. Номенклатура, параметры, размеры, взаимозаменяемость. В 3-х кн. М.: ООО «Изд. центр «Техинформ» МАИ». Кн. 1. Насосы и гидродвигатели. Первое издание 2001. 360 с.| второе издание 2010. 552 с. Кн. 2. Гидроаппаратура. 2002. 508 с. Кн. 3. Вспомогательные элементы гидропривода. 2003. 480 с.

