Революция в машиностроении: умные материалы под контролем магнита
Новое научно-техническое направление
Последние десятилетия подарили инженерному сообществу нечто по-настоящему революционное. Сформировалось новейшее направление, объединившее достижения коллоидной физической химии, физики магнетизма, электромеханики, трибологии, электродинамики и других областей науки.
Результат? Новое поколение магнитоуправляемых материалов. Их физические и функциональные свойства целенаправленно регулируются при воздействии магнитных полей. Представьте: вы меняете параметры магнитного поля — и материал меняет свои характеристики. Это не фантастика, это реальность современного машиностроения.
Магнитоуправляемые композиции синтезируются с применением ультрадисперсных и дисперсных магнетиков. В зависимости от степени дисперсности и организации физико-химической структуры существует несколько типов:
| Тип композиции | Размер частиц | Основа | Применение |
|---|---|---|---|
| Магнитные коллоиды (жидкости) | Несколько десятков нанометров | Жидкости-носители + ультрадисперсные магнетики | Уплотнения, смазка |
| Магнитореологические жидкости | До нескольких микрон | Суспензии с феррофазой | Муфты, демпферы |
| Микроносители | Микронный диапазон | Частицы в полимерной/электропроводной оболочке | Специализированные системы |
Способность изменять вязкость и напряжение сдвига под воздействием магнитного поля открывает фантастические возможности. Можно создавать управляемые механические устройства, осуществлять включение и отключение передачи крутящего момента, управлять демпфированием колебаний. И всё это — плавно, точно, автоматически.
Магнитореологические муфты: будущее трансмиссии
Как работает умное сцепление
Современный автомобиль требует сложных решений. Муфты должны работать на различных режимах: сцепления, скольжения, тормоза. Более того — функционировать в режиме обратной связи, регулироваться автоматически от единого блока управления, контролирующего все системы автомобиля.
Магнитореологические муфты обладают всеми этими качествами. Они позволяют создавать саморегулирующиеся узлы и существенно увеличивать ресурс работы. По сравнению с традиционными решениями преимущества очевидны:
- ✓ Возможность регулирования в режиме скольжения
- ✓ Небольшая потребляемая мощность
- ✓ Плавность изменения характеристик
- ✓ Поглощение крутильных колебаний
- ✓ Передача больших моментов (в многодисковом исполнении)
Для автомобиля малого класса разработана и испытана магнитореологическая муфта, заменившая фрикционное сцепление. Характеристики впечатляют:
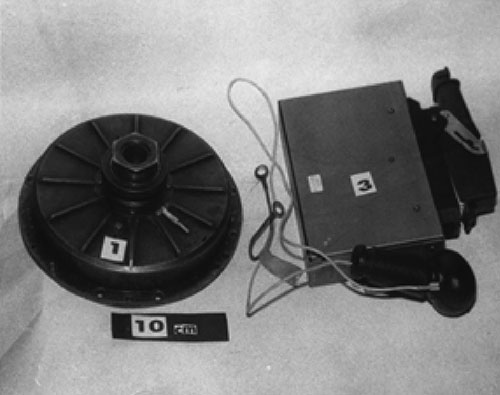
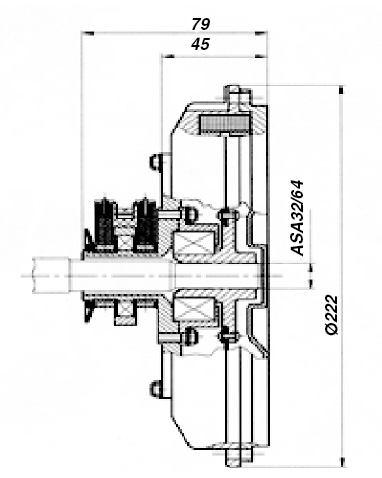
Рис. 1. Магнитоуправляемая муфта сцепления для автомобиля
| Параметр | Значение |
|---|---|
| Передаваемый момент | > 55 Nm |
| Средняя температура корпуса | 200°C |
| Потребляемая мощность | 25 Вт |
| Максимальные обороты | 5500 об/мин |
| Момент инерции входной части | > 0,15 кг/м |
| Момент инерции выходной части | 3 гм |
| Активная площадь ведомого диска | 168 см² (радиус 7,5 см) |
| Объем рабочей среды | 30 мл³ |
Муфта сцепления управляется блоком управления по заданному алгоритму. Выключение происходит принудительно выключателем на ручке переключения скоростей или автоматически при достижении оборотов двигателя ниже 1200 об/мин.
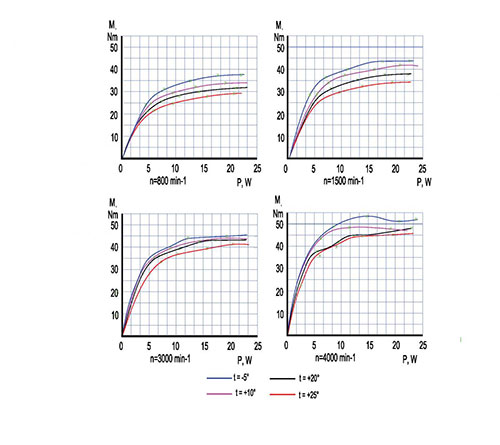
Рис. 2. Зависимость момента от напряжения, частоты вращения, температуры диска
Заданный алгоритм достигается изменением напряжения на катушке магнитопровода от 0 до 12V. Был предусмотрен режим торможения двигателем при сбросе дросселя. Пробег автомобиля в городском режиме составил 23 тыс. км. Проведены ускоренные ресурсные испытания по оптимизации рабочей среды.
Выводы эксперимента показали целесообразность усовершенствования системы управления. Поддержание минимально допустимого скольжения ведомой и ведущей частей при синхронном вращении уменьшает время выключения сцепления, исключает эффект заклинивания.
Блокировка дифференциала: полный контроль над автомобилем
Умная система полного привода
Предлагаемая технология благодаря управляемой работе муфты в режиме скольжения позволяет использовать обратную связь от датчиков скорости вращения колес. Это обеспечивает полную блокировку дифференциала на малых скоростях и частичную — на высоких.
Известные способы (червячные, вязкостные, фрикционные) не позволяют использовать блокировку в полной мере. Предлагаемая конструкция по сравнению с традиционными типами муфт передает большие крутящие моменты, делает механизм блокировки более надежным и дешевым.
Принцип работы прост и эффективен. Магнитоуправляемая композиция находится между ведомым и ведущим дисками. При буксовании одного из колес датчики подают сигнал на блок управления. С блока соответствующий ток подается на катушку магнитопровода муфты. Композиция в магнитном поле меняет вязкость, увеличивается вязкостное трение между дисками — муфта блокируется.
Момент блокировки зависит от величины силы тока. Алгоритм отслеживает частоту вращения каждого колеса и подает определенную величину тока, обеспечивая устойчивость автомобиля на дороге при любых скоростях.
Отличительные характеристики системы
| Характеристика | Значение | Преимущество |
|---|---|---|
| Сухое трение | Отсутствует | Меньший износ |
| Регулирование | В режиме скольжения | Плавность работы |
| Потребляемая мощность | ≤ 25 Вт | Экономичность |
| Максимальные обороты | 5500 об/мин | Широкий диапазон |
| Передаваемый момент | 55 Nm | Высокая мощность |
| Объем композиции | 30 см³ | Компактность |
| Питание | 12 V (борт) | Стандартное |
| Пробег (городской цикл) | 42 тыс. км | Проверено |
Механические и регулировочные характеристики подобных муфт зависят от типа магнитоуправляемой композиции. Тип, использованный в описанной муфте, характеризуется регулируемыми вязкостью и пределом текучести (касательные напряжения сдвига).
Их значения зависят от параметров магнитного поля и скорости сдвига, которые определяют зависимость нагрузочного момента муфты и ее выходную скорость. Режим синхронного вращения достигается благодаря пределу текучести. Когда выходная скорость оказывается ниже входной (касательные напряжения превзошли предел текучести), предельный момент зависит также от гидродинамической составляющей.
Эта идеология реализована в конструкции муфты для автомобиля малого класса. Разработана магнитоуправляемая композиция с требуемыми магнитными и реологическими свойствами, проведены расчеты, разработана конструкторская документация, изготовлены несколько экземпляров.
Опытные образцы прошли стендовые и ходовые испытания. Механические и регулировочные характеристики подтвердили эффективность технического решения: конструкция — магнитоуправляемая композиция — система управления.
Испытания проводились в жестких условиях по нагрузкам и температурам. В конечном варианте с использованием оптимальной композиции муфта проработала 3,5 месяца на испытательном стенде и в составе изделия. Положительный результат получен во многом благодаря отработанной технологии синтеза.
Система управления обеспечивала требуемую работоспособность при приблизительно 35-процентном ухудшении магнитореологических характеристик композиции. Оценка эквивалентного ресурса для нормальных условий свидетельствует о превышении профилактического срока на ~15%.
Дополнительные применения муфт
Опыт использования магнитореологической муфты в качестве сцепления стал базой для разработки муфт в других узлах автомобиля:
- ☑ Муфта привода вентилятора охлаждения радиатора. Использование обратной связи от датчика температуры позволяет поддерживать оптимальную температуру
- ☑ Муфта привода механического нагнетателя наддува. Автоматизирует процесс включения/выключения нагнетателя для получения наибольшего КПД двигателя
- ☑ Муфта отключения водяной помпы двигателя. Обеспечивает ускоренное прогревание при холодном пуске и уменьшение выбросов токсичных газов
Активная подвеска на магнитореологических демпферах
Революция в комфорте и управляемости
Эксплуатационные качества автомобиля напрямую зависят от статических и динамических свойств упругих и демпфирующих элементов подвески, от системы управления. Большое разнообразие конструкций обусловлено стремлением улучшить хотя бы один из критериев: комфорт и плавность движения| устойчивость, безопасность и управляемость| стабилизация пространственного положения кузова.
Большинство пассивных и управляемых активных подвесок относятся к дискретному типу. Они имеют две-три ступени автоматически или вручную переключаемых жесткости и демпфирования. Однако время между переключениями существенно больше времени переходного процесса самого быстрого элемента подвески — колеса.
Подобные решения не в состоянии эффективно обеспечить стабилизацию силы давления колеса на дорогу и исключить «пробой подвески». Это серьезно.
Сейчас известны активные подвески с системами управления на основе гидроамортизаторов, дискретных управляющих элементов (электромагнитных, гидро- и пневмоклапанов), шаговых электродвигателей. Управление осуществляется с помощью микропроцессоров или электронных контроллеров по сигналам датчиков. Быстродействие составляет 50 мс, что также превышает время переходных процессов пары колесо-дорога.
Наиболее перспективными представляются устройства на основе магнитоуправляемых композиций.
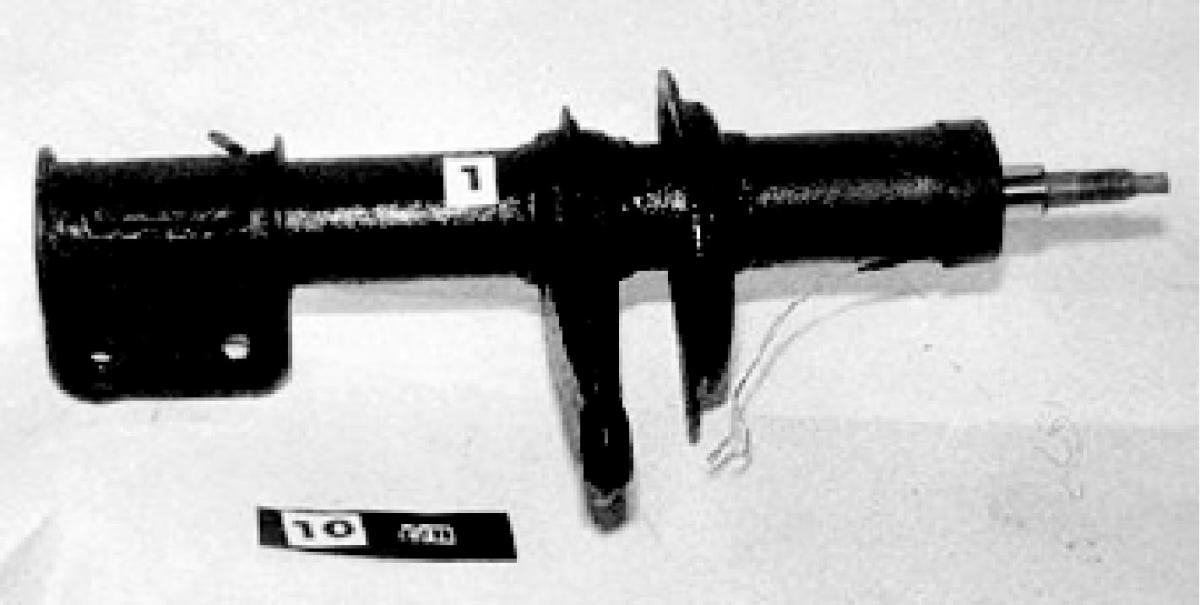
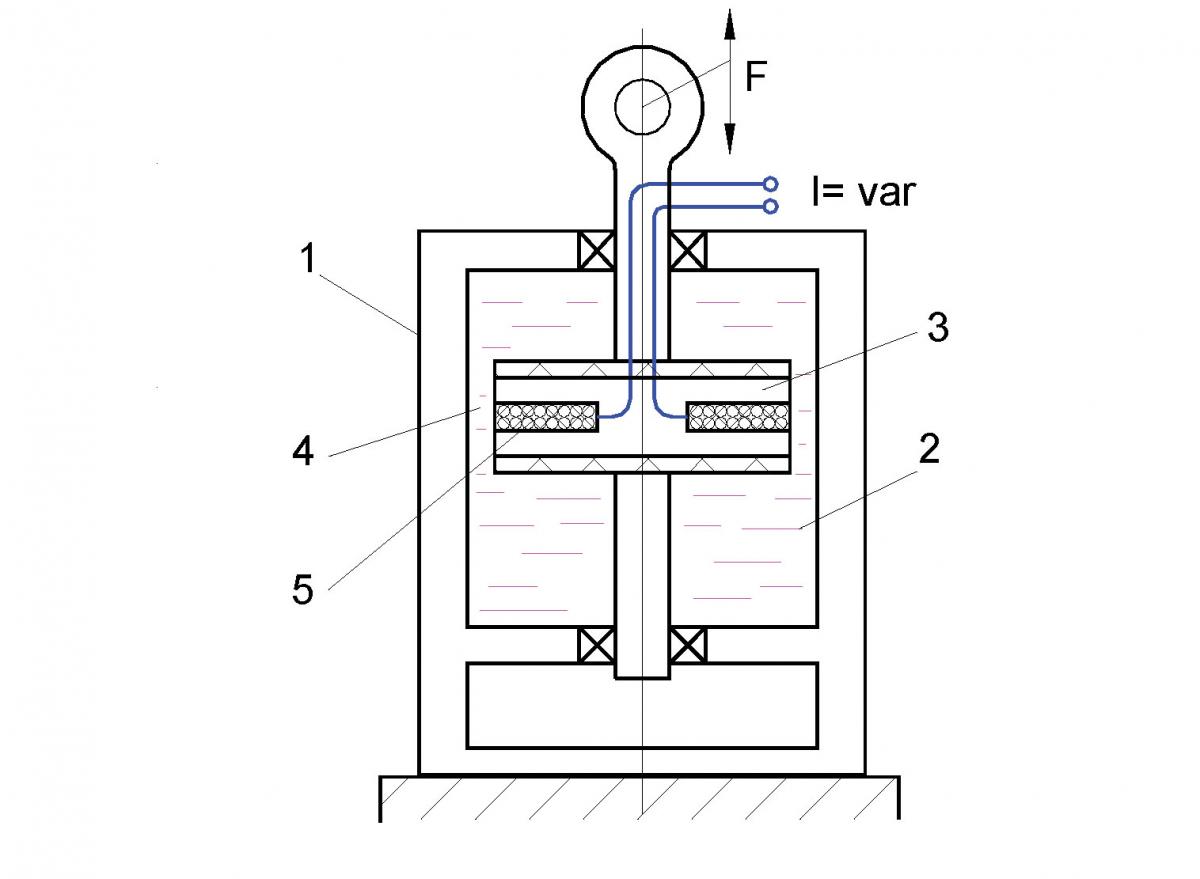
Рис. 3. Магнитоуправляемый демпфер. Рис. 4. Схема магнитоуправляемого демпфера
Технические требования к системе
Создание активной подвески на базе управляемого магнитореологического амортизатора (УМРА) связано с решением ряда задач:
- → Создание магнитоуправляемой композиции (рабочая среда в УМРА)
- → Разработка системы съема и обработки первичной информации
- → Разработка алгоритмического обеспечения системы управления
- → Схемотехническая и приборная реализация блока управления
Требуемые параметры системы:
| Параметр | Значение |
|---|---|
| Кдмин (при Iу = 0) | 200 ± 10 Н·с/м |
| Кдмакс (при Iу = 5 А) | 5000 ± 200 Н·с/м |
| Питание от борта | 12 ± 0,5 В |
| Диапазон рабочих температур | -40...+70°C |
| Диапазон скоростей | -1 м/с V +1 м/с |
| Быстродействие | Не ниже 10 мс |
В качестве рабочей среды использована разработанная магнитореологическая композиция с требуемыми магнитными и реологическими свойствами. Проведены расчеты, разработана конструкторская документация. Опытные образцы прошли стендовые испытания для автомобилей среднего и малого классов.
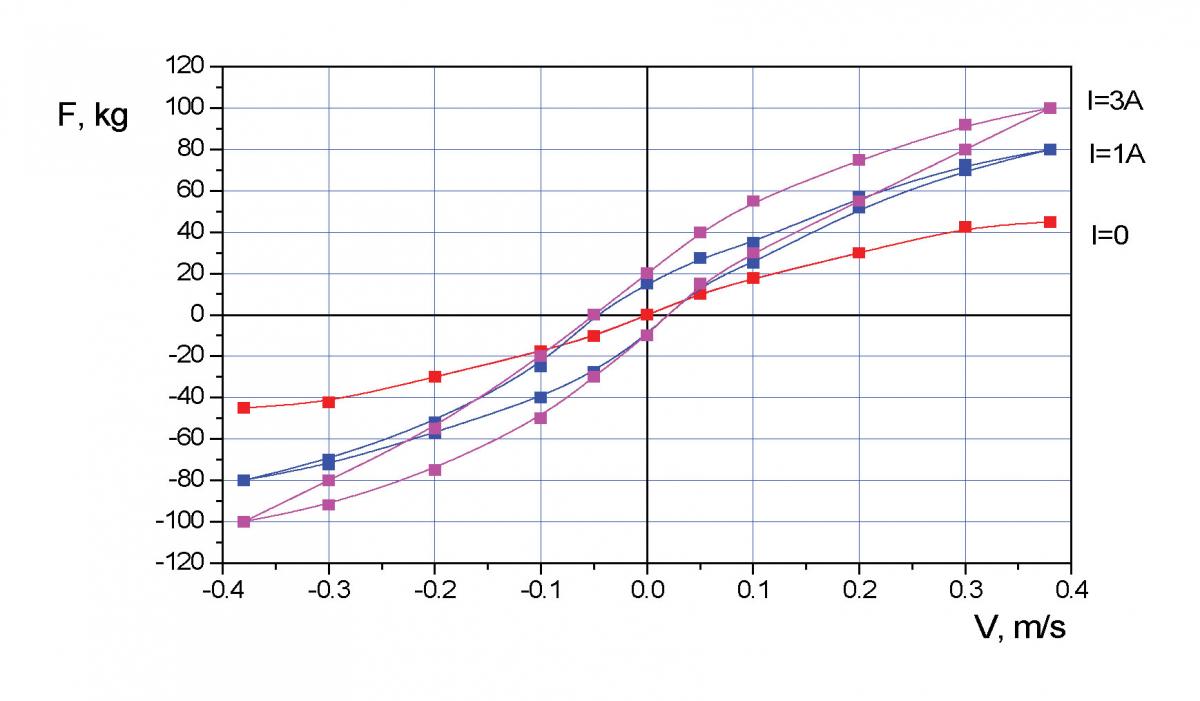
Рис. 5. Влияние скорости на силу при различном токе управления
На графике представлена зависимость демпфирующего усилия от скорости (диапазон от -0,4 до +0,4 м/с) и токах управления от 0 до 3 А. Результаты обнадеживают.
Магнитные смазки: защита узлов трения
Нанотехнологии в трибологии
В ИМАШ РАН разработаны магнитоуправляемые смазочные материалы (МСМ) с наноразмерной феррофазой и повышенной термостабильностью. Исследованы их магнитные, реологические и трибологические свойства при контактных давлениях, скоростях и температурах применительно к различным зубчатым передачам, подшипникам качения и скольжения.
Существенным образом на топографию магнитного поля влияет геометрия поверхностей, определяющих форму слоя МСМ, направление и величина градиента напряженности магнитного поля. Это определяет перемещение и удержание МСМ в узких зазорах. Механизм наиболее проявляется в случае зубчатого зацепления.
Улучшение трибологических свойств обеспечивается усилением магнитных свойств дисперсной феррофазы за счет увеличения концентрации и параметров управляющего магнитного поля, а также повышением вязкости основы МСМ.
Однако при трении контактных поверхностей в условиях граничной и полужидкостной смазки (повышенные давления и температуры, низкие скорости) более эффективным является введение комбинированных присадок.
Механизм воздействия присадок на структуру и свойства магнитных смазочных жидкостей включает:
- ★ Образование прочной внешней оболочки на частицах магнетита
- ★ Адсорбция и химическое взаимодействие присадки со свежеобразованными поверхностями трения
- ★ Адсорбция поверхностно активного вещества на продуктах изнашивания
- ★ Предотвращение последующей агрегации
Использование химически активных присадок из-за их сильного адсорбционного и разрушительного действия на оболочку частиц нежелательно. Для повышения смазочной эффективности предпочтительны комбинации слабых противоизносных присадок с сильными поверхностно активными веществами.
Фазы работы в зубчатом зацеплении
Эффективность МСМ в зубчатом зацеплении иллюстрируется тремя фазами зацепления маркированного зуба на верхнем колесе при его приближении к линии, соединяющей центры обоих зубчатых колес.
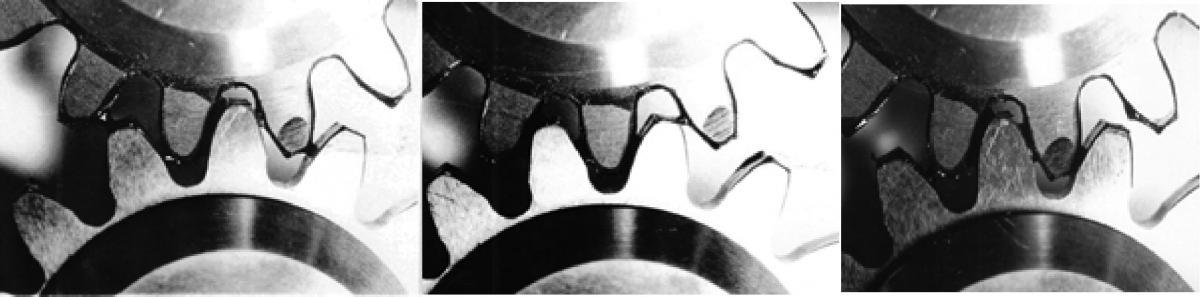
Рис. 6. Фазы зацепления маркированного зуба на верхнем колесе
По мере прохождения зубом фаз № 1, 2, 3 МСМ перемещается и удерживается на участках эвольвентных поверхностей на входе и выходе из контакта, предохраняя их от кромочного контакта. Гениально просто!
Трибологические свойства МСМ в значительной степени обусловлены свойствами жидкости-носителя. Применительно к различным типовым узлам трения представлены типы МСМ с различными основами (углеводородные масла М9 С и ПАОМ20, фторорганика, турбинное масло), а также с высокотемпературными присадками (ВП).
За счет оптимизации состава и структуры МСМ с наноразмерной феррофазой существенно повышаются термостабильность, магнитные и ресурсные параметры.
Результаты испытаний и практическое применение
Проверка временем и температурой
Ресурсные испытания МСМ, проведенные по ГОСТ21466-76, показали существенное увеличение работоспособности:
| Тип МСМ | Основа | Ресурс при 150°C | Ресурс при 200°C |
|---|---|---|---|
| МСМ № 1 | М9 С | 175 минут | 2-кратное увеличение |
| МСМ № 2 | М9 С + ВП | 225 минут | 3-кратное увеличение |

Рис. 7. Работоспособность МСМ: а – ресурс (минуты) при 150°C, б – ресурс (минуты) при 200°C
Сопоставление полученных при 200°C работоспособностей МСМ и их основ показывает двухкратное увеличение этого параметра у МСМ № 1 (основа М9 С) и трехкратное у МСМ № 2 (основа М9 С+ВП).
Рекомендуемые области применения различных типов МСМ определяются уровнем нагрузок, скоростей и температур. Воздействие на МСМ градиентных магнитных полей обеспечивает целенаправленное перемещение и удержание в контакте поверхностей трения зубчатых передач, подшипниковых и уплотнительных конструкций.
Положительный эффект от применения МСМ в зубчатых передачах, особенно в мелкомодульных, а также в разработанных червячном и двухступенчатом редукторах объясняется:
- ✔ Длительным удержанием магнитной жидкости в зазоре и зоне контакта
- ✔ Постоянством свойств в широком диапазоне температур, давлений и скоростей
- ✔ Повышенной износостойкостью трущихся материалов
Предложенные магнитоуправляемые конструкции (демпферы, муфты, редукторы), а также магнитно-смазочные материалы имеют ряд преимуществ: минимальные габариты, быстродействие, низкий коэффициент трения, повышенная износостойкость пар трения и эффективность использования.
Что в итоге? Легкость, надежность и долговечность изделий. Именно то, что нужно современному машиностроению.
А. Ю. Албагачиев, В. Д. Данилов (ИМАШ РАН)
е-mail: Albagachiev@yandex.ru, 8-905-7006368

