Преимущества шаговых двигателей в автоматизации
Шаговые двигатели — это не просто «ещё один тип привода». Высокая надёжность, простота управления, отсутствие сложных дорогих систем обратной связи. Вот почему компания Балтийское Объединение ОАО в своих разработках делает ставку именно на них.
Где они оправданы? В управлении станками для обработки цветных металлов, дерева, пластика. В машинах плазменной, лазерной резки. В плоттерах, медтехнике, других механизмах, где не требуются огромный крутящий момент и запредельные скорости подачи.
Но есть нюанс. Для специфических задач могут использоваться комбинированные методы. Например, шаговый двигатель + энкодер для точного определения положения ротора. Гибкость подхода — это важно.
Недостатки шаговых приводов: что нужно знать
К сожалению, идеальных решений не бывает. Шаговый двигатель, при всех достоинствах, имеет существенные недостатки: малая удельная мощность, сравнительно низкие скорости вращения, невысокий крутящий момент.
А ещё — выход из синхронизма. Как дискретный синхронный двигатель, он может терять шаги при перемещении. Результат? Непоправимая ошибка позиционирования. Это не просто «погрешность». Это брак.
И самый неприятный момент — резонанс в электромеханической системе. Одна из главных причин нарушения нормальной работы привода. Что с этим делать?
Наша компания разработала целую линейку драйверов шаговых двигателей. Они минимизируют воздействие резонанса и обеспечивают устойчивую работу электроники, автоматики и всего оборудования в целом.
Драйверы уже используются в электронике станков лазерной, плазменной, фрезерной обработки листовых материалов. Находят применение в отдельных устройствах и опциях. Например, в устройстве слежения на основе емкостного датчика — частое решение для вертикальной Z-координаты.
Природа резонанса в шаговых системах
При работе двигателя на частоте, совпадающей с резонансной, ротор колеблется вокруг положения устойчивого равновесия. Возникает провал момента → пропуск шагов → потеря синхронности.
Без специальных мер шаговый двигатель при разгоне не может пройти резонансную частоту. Усиление амплитуды колебаний ротора вызывает сильные вибрации в передаточных механизмах. Результат? Избыточный шум, преждевременный износ механических деталей, нарушения крепления частей и механизмов.
В любом случае, резонанс способен существенно ухудшить точностные характеристики привода. Поэтому изучение резонансных явлений и нестабильностей шагового привода — это не академический интерес. Это практическая необходимость.
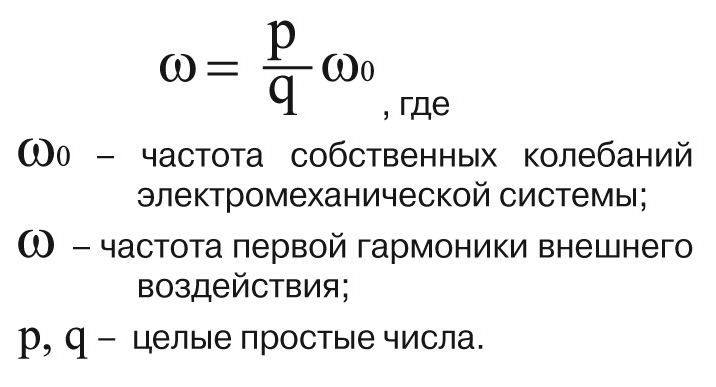
Причина возникновения резонанса? Кратность частот собственных колебаний электромеханической системы и частот возмущающих воздействий управляющих импульсов. В шаговом электроприводе (нелинейная система второго порядка) резонанс возникает при выполнении условия:
В зависимости от сочетания, резонанс и нестабильность пускового момента классифицируются по трём группам: низкочастотный резонанс, среднечастотная нестабильность, высокочастотные колебания.
Низкочастотный резонанс (до 500 Гц)
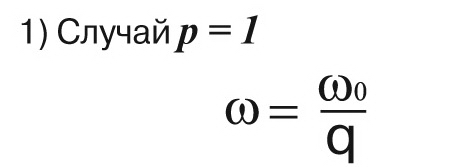
Когда двигатель запускается с очень малой частоты вращения, а частота импульсов возрастает медленно, возникает резонанс на обертоне внешней частоты и субгармонические колебания:
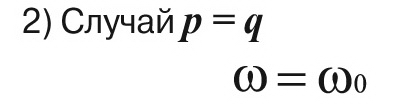
Появляется главный резонанс на частотах собственных колебаний системы:
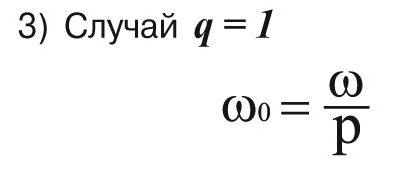
Возникает параметрический резонанс на обертоне собственной частоты:
Три механизма. Три сценария. И для каждого — свой подход к подавлению.
Среднечастотная нестабильность (500-1500 Гц)
Одна из важнейших проблем, которую пришлось решать при разработке драйвера шагового двигателя. Как преодолеть данный вид резонанса?
Он наблюдается при возрастании шаговых частот до 500–1500 Гц и составляет 1/4, 1/5 шаговой частоты вращения. Неочевидно? Да. Критично? Безусловно.
Особенности среднечастотной нестабильности
Нестабильность имеет следующие особенности:
- → Колебания имеют одну или несколько частотных компонент. Они не связаны простым соотношением с шаговой частотой вращения двигателя и имеют более низкую частоту 5–200 Гц.
- → При постоянных условиях работы наблюдаются медленно вырастающие колебания. Нарушение нормальной работы системы наступает через несколько секунд или даже минут. Возможна внезапная потеря синхронизма.
- → Характеристики нестабильности зависят от схемы и алгоритма управления.
- → Существенное влияние оказывает повышение момента инерции системы. Большая инерционность увеличивает нестабильность.
Четыре пункта. Четыре точки приложения усилий для инженера.
Высокочастотные колебания (1500-2500 Гц)
Высокочастотная нестабильность возникает на частотах 1500–2500 Гц, когда двигатель успешно проходит область среднечастотной нестабильности.
Казалось бы, прошёл один барьер — и можно расслабиться. Но нет. Новые частоты — новые вызовы.
Алгоритм обхода резонансных частот
Анализируя условия и причины возникновения резонанса, наши специалисты выделили методы борьбы с каждой его разновидностью. Но проблема остаётся: как реализовать решение, избавляющее от тех нестабильностей, которые оказывают наибольшее влияние на работу привода?
Ответ — в алгоритмах. Не в «железе» как таковом. А в том, как это «железо» управляется.
Микрошаговый инвертор на 8А: практическое решение
К настоящему времени Балтийским Объединением ОАО разработан микрошаговый инвертор с номинальным током фазы 8А. В нём реализован алгоритм обхода резонансных частот.
Что это даёт? Мягкость хода во всём диапазоне рабочих скоростей. Без рывков. Без вибраций. Без потери шагов.
Использование такого алгоритма особенно важно для управления мощными двигателями с шагом 1,8° типа FL57, FL60, FL86, FL110 и т.п. Решение в пользу инвертора с таким алгоритмом повышает качество работы механической системы.
Особенно — системы на зубчатых приводных ремнях, которой характерна прямая передача момента от вала двигателя на ремень через шестерню без редукции (ведущая шестерня кинематической системы зафиксирована непосредственно на валу двигателя). Прямая передача = меньше люфтов. Но и больше требований к стабильности привода.
Где применяются драйверы Балтийского Объединения
Драйверы уже работают в электронике станков лазерной, плазменной, фрезерной обработки листовых материалов. Находят применение в отдельных устройствах и опциях, разработанных нашими специалистами.
Например, в устройстве слежения на основе емкостного датчика — частое решение для вертикальной Z-координаты. Точное позиционирование по оси, которая отвечает за глубину реза или высоту подачи. Критично? Ещё бы.
| Тип нестабильности | Частотный диапазон | Характер проявления | Метод подавления |
| Низкочастотный резонанс | До 500 Гц | Резонанс на обертоне, субгармоники, параметрический резонанс | Алгоритм обхода резонансных частот, микрошаговое управление |
| Среднечастотная нестабильность | 500–1500 Гц | Медленно растущие колебания, внезапная потеря синхронизма | Оптимизация схемы управления, учёт момента инерции |
| Высокочастотные колебания | 1500–2500 Гц | Колебания после прохождения среднечастотной зоны | Фильтрация управляющих сигналов, демпфирование |
Что в сухом остатке? Шаговые двигатели — это надёжно, просто, доступно. Но без грамотного драйвера их потенциал не раскрыть. Резонанс, потеря шагов, вибрации — это не «особенности работы». Это проблемы, которые решаются.
Алгоритм обхода резонансных частот в микрошаговом инверторе на 8А — не маркетинг. Это инженерное решение, которое работает. В станках. В медицинском оборудовании. В системах, где точность — не пожелание, а требование.
Заметьте: Балтийское Объединение ОАО не просто продаёт драйверы. Компания разрабатывает их под конкретные задачи. Адаптирует. Тестирует. Это подход, который даёт результат. Не на бумаге. В цеху.
Балтийское Объединение ОАО
Технический директор
Паршин Константин Эдвардович
Адрес: 199106, Россия, СанктПетербург,
Шкиперский пр. 14
Тел.: +7 (812) 715 69 66/77
Факс +7 (812) 3563573
Email: info@baltio.ru
Http:// www.baltio.ru
199106, Россия, СанктПетербург,Шкиперский пр. 14 +7 (812) 715 69 66/77 +7 (812) 3563573 info@baltio.ru www.baltio.ru
* при использовании и перепечатывании ссылка на источник или сайт обязательна

