Шесть степеней свободы: новые возможности обработки
Робот как фрезерный станок с ЧПУ — это уже не фантастика, а реальность современного производства. Шесть степеней свободы робота открывают возможности, о которых традиционные станки могли только мечтать.
Подойти к точке с любой стороны пространства. Обработать деталь высокой сложности, недоступную для пятиосевых станков. Гибкость, которая меняет правила игры.
Но есть нюанс. Просто купить робота недостаточно. Нужна правильная система программирования.
Программирование роботов: от траекторий до постпроцессоров
Новые роботы — новые требования к их программированию. Старые подходы не работают.
Что критично важно?
- ✔️ Реализация траекторий многоосевой схемы обработки
- ✔️ Виртуальное моделирование обработки
- ✔️ Избежание коллизий
- ✔️ Постпроцессирование
Каждый пункт — это отдельная задача. И все они должны решаться комплексно.
SprutCAM 8 «Робот»: виртуальное моделирование
Новая конфигурация системы SprutCAM вер. 8 «Робот» позволяет полностью смоделировать весь процесс обработки детали с учетом кинематической схемы робота.
Траектория алгоритмов обработки используется такая же, как и для многоосевых фрезерных обрабатывающих центров. Это значит, что специалисты, знакомые с программированием станков с ЧПУ, могут быстро освоить работу с роботами.
Виртуальное моделирование — не просто красивая картинка. Это возможность увидеть проблемы до того, как они станут дорогостоящими ошибками в реальном производстве.
Кинематическая схема: искусство 3D-моделирования
Искусство заключается в создании кинематической схемы робота как набора 3D-моделей узлов, последовательности их перемещений и ограничений угловых поворотов.
Звучит сложно? Давайте разберемся.
Кинематическая схема — это цифровая копия вашего робота. Точная, детализированная, учитывающая все ограничения. Без нее программирование превращается в гадание на кофейной гуще.
А также необходима взаимосвязь схемы с постпроцессором, который и формирует управляющую программу. Постпроцессор — это переводчик между языком CAM-системы и языком контроллера робота.
Работа с поворотным столом
Кинематическая схема робота может использоваться совместно с другими органами управления, например, поворотным столом. При этом обработка происходит инструментом, вставленным в перемещаемую роботом рабочую головку.
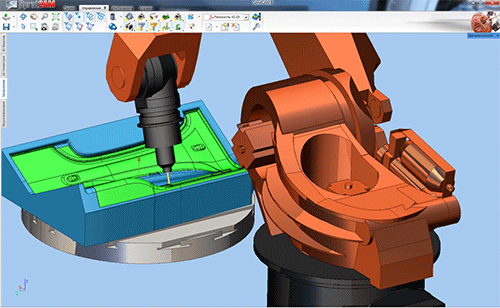
Рис. 1. SprutCAM. Фрезерование детали роботом Kuka на поворотном столе
Поворотный стол добавляет еще одну степень свободы. Возможности расширяются exponentially.
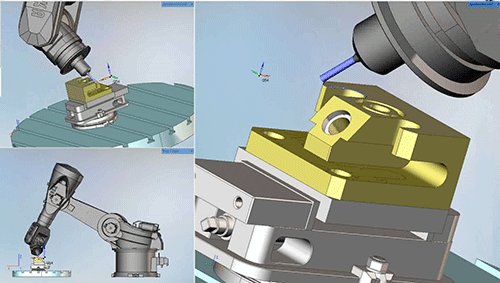
Рис. 2. SprutCAM. Фрезерование кромок на поворотном столе в тисках
Обработка кромок сложных деталей — задача, где роботы показывают себя с лучшей стороны.

Рис. 3. Воплощение искусства программирования в SprutCAM. Agut Enginyeria S.L. Испания. Робот «Kuka»
Неподвижный шпиндель: обратная кинематика
Не всегда робот держит инструмент. Иногда все наоборот.
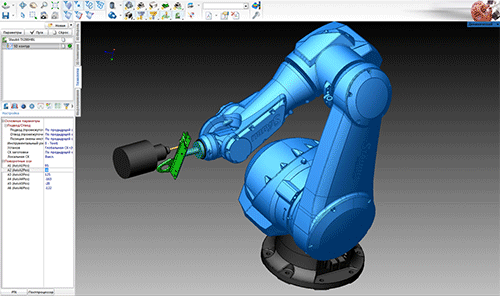
Рис. 4. SprutCAM. Фрезерование детали роботом Staubli с неподвижным шпинделем
На схеме фрезерование производится путем перемещения заготовки, закрепленной в позиционере робота, инструментом в неподвижном шпинделе.
Обратная кинематика требует особого подхода к программированию. Но результат стоит усилий.
Моделирование без коллизий: безопасность прежде всего
Реалистичность моделирования в системе SprutCAM позволяет получить образ осмысленной действительности в реальном масштабе времени с отсутствием коллизий.
Что это значит на практике? Система предотвращает:
- ✓ Соударения робота с оснасткой
- ✓ Зоны сингулярности (положения, где робот теряет степень свободы)
- ✓ Недосягаемые зоны обработки
- ✓ Выход сочленений за пределы допустимых угловых перемещений
Интерактивные средства управления положением суставов робота и управление наклоном оси инструмента в любой точке траектории позволяют ввести корректировку рабочего задания и получить безопасную программу обработки детали.
Безопасность — не просто слово. Это экономия миллионов на ремонте оборудования.
Поддерживаемые роботы: Kuka, Fanuc, Staubli, ABB
Реализация фрезерных многоосевых стратегий обработки, кинематических схем и постпроцессоров в SprutCAM позволяет программировать фактически любые роботы.
Уже сегодня в SprutCAM программируются промышленные роботы:
| Производитель | Серии роботов | Грузоподъемность | Применение |
|---|---|---|---|
| Kuka | KR QUANTEC, KR AGILUS | 6-300 кг | Фрезерование, сварка, обработка |
| Fanuc | R-2000, M-2000 | 12-1200 кг | Тяжелая обработка, фрезерование |
| Staubli | TX, RX серии | 3-90 кг | Прецизионная обработка |
| ABB | IRB 4600, IRB 6640 | 40-185 кг | Универсальная обработка |
Универсальность системы — ее главное преимущество. Не нужно покупать отдельное ПО для каждого производителя роботов.
Цена и качество: оптимальное решение
Адекватное соотношение цены робота и программного обеспечения SprutCAM дает оптимальное предложение на рынке.
Давайте посчитаем. Традиционный пятиосевой обрабатывающий центр стоит от 10-15 миллионов рублей. Промышленный робот с системой SprutCAM — в 2-3 раза дешевле. При этом возможности обработки часто шире.
Экономика проста.
Секретами «оживления» роботов компания готова поделиться на выставке «Металлообработка-2013» (павильон №2, зал 3, стенд 23F70).

Роботы — это не замена традиционным станкам. Это расширение возможностей. Новый уровень гибкости производства.
Вопрос не в том, заменят ли роботы станки. Вопрос в том, насколько быстро вы освоите эту технологию.
Николай Сергеев
Компания «СПРУТ-Технология»
Москва (495) 720-63-94
(499) 263-60-57/69-70/66-14
г. Набережные Челны (8552) 59-94-09/10
Бесплатный звонок по России 8 800 700 1024
www.sprut.ru

